Оновлення LinuxCNC до нового минорного релізу (тобто до нової версії в тій самій стабільній серії, наприклад, з 2.9.7 до 2.9.8) відбувається автоматично, якщо ваш ПК підключено до Інтернету. Ви побачите запит на оновлення після минорного релізу разом з іншими оновленнями програмного забезпечення. Якщо у вас немає підключення до Інтернету на вашому ПК, див. Оновлення без мережі.
1. Оновіться до нової версії
У цьому розділі описано, як оновити LinuxCNC з версії 2.8.x до версії 2.9.y. Припускається, що у вас є встановлена версія 2.8, яку ви хочете оновити.
Щоб оновити LinuxCNC з версії, старшої за 2.8, спочатку необхідно оновити стару версію до 2.8, а потім виконати ці інструкції для оновлення до нової версії.
Якщо у вас немає старої версії LinuxCNC для оновлення, тоді краще зробити чисту інсталяцію нової версії, як описано в розділі Отримання LinuxCNC.
Крім того, якщо ви використовуєте Ubuntu Precise, Debian Wheezy або Debian Buster, варто розглянути можливість створення резервної копії каталогу "linuxcnc" на знімному носії та виконання чистої інсталяції новішої ОС та версії LinuxCNC, оскільки ці випуски були EOL у 2017, 2018 та 2022 роках відповідно. Якщо ви використовуєте Ubuntu Lucid, вам доведеться зробити це, оскільки Lucid більше не підтримується LinuxCNC (він був EOL у 2013 році).
Щоб оновити основні версії, наприклад 2.8 до 2.9, коли у вас є мережеве підключення на комп’ютері, вам потрібно вимкнути старі джерела linuxcnc.org apt у файлі /etc/apt/sources.list і додати нове джерело linuxcnc.org apt для 2.9, а потім оновити LinuxCNC.
Деталі залежатимуть від платформи, на якій ви працюєте. Відкрийте terminal, а потім введіть lsb_release -ic, щоб знайти цю інформацію:
lsb_release -ic
Дистриб'ютор ID: Debian
Кодове ім'я: TrixieВи повинні використовувати Debian Bullseye, Bookworm або Trixie, або Ubuntu 20.04 "Focal Fossa" або новішу версію. LinuxCNC 2.9.y не працюватиме на старіших дистрибутивах.
Вам також потрібно буде перевірити, яке ядро реального часу використовується:
uname -r
6.1.0-10-rt-amd64Якщо ви бачите (як вище) -rt- в імені ядра, то ви використовуєте ядро preempt-rt і повинні встановити версію LinuxCNC «uspace». Ви також повинні встановити uspace для конфігурацій «sim» на ядрах, що не працюють в режимі реального часу.
Якщо ви бачите «-rtai-» в назві ядра, то ви використовуєте RTAI realtime. Дивіться нижче, яку версію LinuxCNC потрібно встановити. Пакет RTAI доступний для Bookworm і Buster, але наразі недоступний для Bullseye.
1.1. Конфігурація Apt Sources
-
Відкрийте вікно «Джерела програмного забезпечення». Процес цього дещо відрізняється на трьох підтримуваних платформах:
-
Debian:
-
Натисніть «Меню програм», потім «Система», а потім «Менеджер пакетів Synaptic».
-
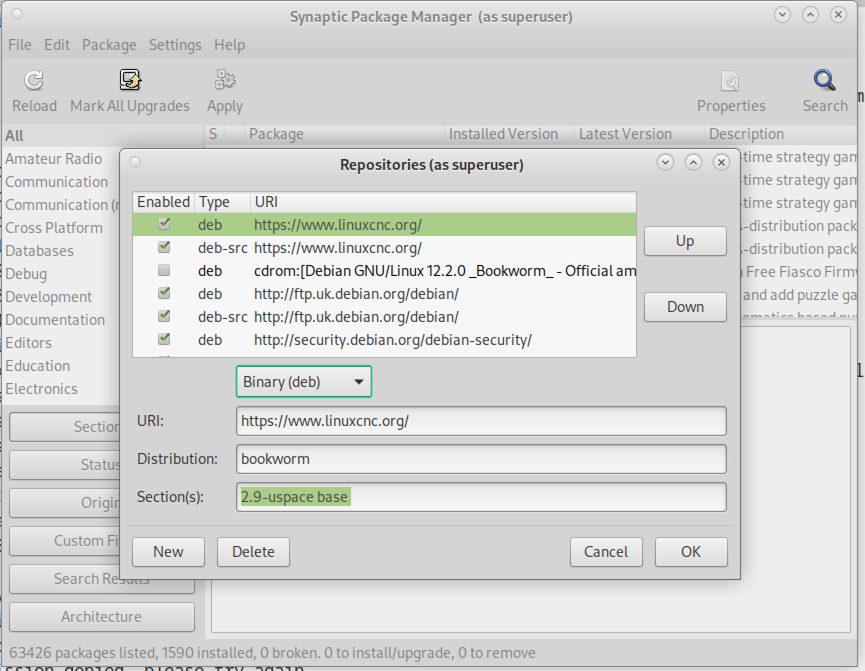
У Synaptic натисніть меню «Налаштування», потім натисніть «Репозиторії», щоб відкрити вікно «Джерела програмного забезпечення».
-
-
Точність Ubuntu:
-
Натисніть на значок «Головна панель Dash» у верхньому лівому куті.
-
У полі «Пошук» введіть «програмне забезпечення», а потім натисніть на значок «Центр програмного забезпечення Ubuntu».
-
У вікні Центру програмного забезпечення Ubuntu натисніть меню «Редагувати», потім натисніть «Джерела програмного забезпечення…», щоб відкрити вікно «Джерела програмного забезпечення».
-
-
Ubuntu Lucid:
-
Натисніть меню «Система», потім «Адміністрування», а потім «Менеджер пакетів Synaptic».
-
У Synaptic натисніть меню «Налаштування», потім натисніть «Репозиторії», щоб відкрити вікно «Джерела програмного забезпечення».
-
-
-
У вікні «Джерела програмного забезпечення» виберіть вкладку «Інше програмне забезпечення».
-
Видаліть або зніміть позначки з усіх старих записів linuxcnc.org (залиште всі рядки, що не стосуються linuxcnc.org, як є).
-
Натисніть кнопку «Додати» та додайте новий рядок apt. Рядок дещо відрізнятиметься на різних платформах:
| ОС / Версія реального часу | Репозиторій |
|---|---|
Debian Bullseye - випередження |
|
Debian Bookworm - випередити |
|
Debian Bookworm - RTAI |
|
Debian Trixie - витіснення |
|
Debian Trixie - RTAI |
|
-
Натисніть кнопку «Додати джерело», а потім «Закрити» у вікні «Джерела програмного забезпечення». Якщо з’явиться вікно з повідомленням про те, що інформація про доступне програмне забезпечення застаріла, натисніть кнопку «Перезавантажити».
1.2. Оновлення до нової версії
Тепер ваш комп’ютер знає, де взяти нову версію програмного забезпечення, далі нам потрібно її встановити.
Процес знову ж таки відрізняється залежно від вашої платформи.
1.2.1. Debian Bullseye, Bookworm та Trixie
Debian використовує менеджер пакетів Synaptic.
-
Відкрийте Synaptic, використовуючи інструкції з розділу Налаштування джерел apt вище.
-
Натисніть кнопку «Перезавантажити».
-
Використайте функцію пошуку для пошуку
linuxcnc. -
Пакет називається "linuxcnc" для ядер RTAI та "linuxcnc-uspace" для preempt-rt.
-
Поставте галочку, щоб позначити нові пакети linuxcnc та linuxcnc-doc-* для оновлення. Менеджер пакетів може вибрати ряд додаткових пакетів для встановлення, щоб задовольнити залежності, які має новий пакет linuxcnc.
-
Натисніть кнопку «Застосувати» та дозвольте комп’ютеру встановити новий пакет. Старий пакет linuxcnc буде автоматично оновлено до нового.
1.3. Ubuntu
-
Натисніть на значок «Головна панель Dash» у верхньому лівому куті.
-
У полі «Пошук» введіть «оновлення», а потім натисніть на значок «Менеджер оновлень».
-
Натисніть кнопку «Перевірити», щоб отримати список доступних пакетів.
-
Натисніть кнопку «Встановити оновлення», щоб встановити нові версії всіх пакетів.
2. Оновлення без мережі
Щоб оновити систему без мережевого підключення, потрібно завантажити .deb-файл, а потім встановити його за допомогою dpkg. Deb-файли можна знайти за адресою https://linuxcnc.org/dists/.
Вам потрібно перейти за посиланням вище, щоб знайти правильний deb-файл для вашої інсталяції. Відкрийте terminal та введіть lsb_release -ic, щоб знайти назву випуску вашої ОС.
> lsb_release -ic
Дистриб'ютор ID: Debian
Кодове ім'я: trixieВиберіть ОС зі списку, а потім виберіть потрібну основну версію, наприклад, 2.9-rt для RTAI або 2.9-uspace для preempt-rt.
Далі виберіть тип вашого комп’ютера: binary-amd64 для 64-бітного ПК або binary-arm64 (64-біт) для Raspberry Pi.
Далі виберіть потрібну версію знизу списку, наприклад, «linuxcnc-uspace_2.9.8_amd64.deb» (виберіть найновішу за датою). Завантажте deb-файл і скопіюйте його до свого домашнього каталогу. Ви можете перейменувати файл на щось коротше за допомогою файлового менеджера, наприклад, «linuxcnc_2.9.8.deb», потім відкрийте термінал і встановіть його за допомогою менеджера пакетів за допомогою цієї команди:
sudo dpkg -i linuxcnc_2.9.8.deb3. Оновлення файлів конфігурації для версії 2.9
3.1. Суворіша обробка підключаємих інтерпретаторів
Якщо ви просто запускаєте звичайний G-код і не знаєте, що таке підключаємий інтерпретатор, то цей розділ вас не стосується.
Рідко використовуваною функцією LinuxCNC є підтримка підключаємих інтерпретаторів, якими керує недокументований INI-файл [TASK]INTERPRETER.
Версії LinuxCNC до версії 2.9.0 обробляли неправильне налаштування [TASK]INTERPRETER, автоматично повертаючись до використання інтерпретатора G-коду за замовчуванням.
Починаючи з версії 2.9.0, неправильне значення [TASK]INTERPRETER призведе до відмови LinuxCNC запускатися. Виправте цю ситуацію, видаливши налаштування [TASK]INTERPRETER з вашого INI-файлу, щоб LinuxCNC використовував інтерпретатор G-коду за замовчуванням.
3.2. Кантерп
Якщо ви просто запускаєте звичайний G-код і не використовуєте підключаємий інтерпретатор canterp, то цей розділ вас не стосується.
У надзвичайно малоймовірному випадку, якщо ви використовуєте canterp, майте на увазі, що модуль переміщено з /usr/lib/libcanterp.so до /usr/lib/linuxcnc/canterp.so, і налаштування [TASK]INTERPRETER відповідно потрібно змінити з libcanterp.so на canterp.so.
3.3. Обмеження шпинделя в INI
Тепер можна додавати налаштування до розділу [SPINDLE] INI-файлу.
MAX_FORWARD_VELOCITY = 20000 Максимальна швидкість шпинделя (в об/хв)
MIN_FORWARD_VELOCITY = 3000 Мінімальна швидкість шпинделя (в об/хв)
MAX_REVERSE_VELOCITY = 20000 Якщо цей параметр пропустити, він матиме значення MAX_FORWARD_VELOCITY за замовчуванням.
MIN_REVERSE_VELOCITY = 3000` Цей параметр еквівалентний MIN_FORWARD_VELOCITY, але для зворотного обертання шпинделя. Якщо його пропустити, за замовчуванням використовуватиметься MIN_FORWARD_VELOCITY.
INCREMENT = 200 Встановлює розмір кроку для команд збільшення/зменшення швидкості шпинделя. Це значення може бути різним для кожного шпинделя. Цей параметр діє з AXIS та Touchy, але зверніть увагу, що деякі екрани керування можуть обробляти речі по-різному.
HOME_SEARCH_VELOCITY = 100 - Прийнято, але наразі нічого не робить
HOME_SEQUENCE = 0 - Прийнято, але наразі нічого не робить
4. Оновлення файлів конфігурації для версії 2.10.y
Touchy: записи Touchy MACRO тепер слід розміщувати в розділі [MACROS] INI-файлу, а не в розділі [TOUCHY]. Це частина процесу уніфікації налаштувань INI між графічними інтерфейсами.
5. Нові компоненти HAL
5.1. Не в реальному часі
mdro mqtt-видавник pi500_vfd pmx485-тест qtplasmac-cfg2prefs qtplasmac-матеріали qtplasmac-plasmac2qt qtplasmac-налаштування sim-факел svd-ps_vfd
5.2. У режимі реального часу
anglejog div2 enum filter_kalman flipflop homecomp limit_axis mesa_uart millturn scaled_s32_sums tof ton
6. Нові водії
Було представлено фреймворк для керування пристроями ModBus за допомогою послідовних портів на багатьох платах Mesa. http://linuxcnc.org/docs/2.9/html/drivers/mesa_modbus.html
Новий драйвер GPIO для будь-якого GPIO, який підтримується бібліотекою gpiod, тепер включено: http://linuxcnc.org/docs/2.9/html/drivers/hal_gpio.html