1. Вступ
GMOCCAPY — це графічний інтерфейс для LinuxCNC, призначений для використання з сенсорним екраном, але його також можна використовувати на звичайних екранах за допомогою миші або апаратних кнопок і коліщаток MPG, оскільки він підтримує HAL Pins для найпоширеніших потреб. Більш детальну інформацію можна знайти нижче.
Він пропонує можливість відображення до 9 осей, підтримує режим токарного верстата для звичайного та зворотного інструменту і може бути адаптований практично до будь-яких потреб, оскільки GMOCCAPY підтримує вбудовані вкладки та бічні панелі. Хорошим прикладом цього є gmoccapy_plasma.
GMOCCAPY 3 підтримує до 9 осей та 9 суглобів. Оскільки код GMOCCAPY 3 був змінений для підтримки змін суглобів/осі в LinuxCNC, він не працює на гілках 2.7 або 2.6!
Він підтримує вбудовану віртуальну клавіатуру (вбудовану або клавіатуру matchbox), тому немає необхідності в апаратній клавіатурі або миші, але його також можна використовувати з цим обладнанням. GMOCCAPY пропонує окрему сторінку налаштувань для конфігурації більшості налаштувань графічного інтерфейсу без редагування файлів.
GMOCCAPY можна дуже легко локалізувати, оскільки відповідні файли відокремлені від файлів linuxcnc.po, тому немає потреби перекладати непотрібні елементи. Якщо ви хочете взяти участь у перекладі, скористайтеся посиланням:веб-редактор перекладів Weblate. Для отримання додаткової інформації див. розділ Translations

2. Вимоги
GMOCCAPY 3 було протестовано на Debian Jessie, Debian Stretch та MINT 18 з LinuxCNC master та версією 2.8. Воно повністю підтримує зміни з’єднань/осей LinuxCNC, що робить його придатним як графічний інтерфейс для Scara, роботів або будь-яких інших конфігурацій з більшою кількістю з’єднань, ніж осей. Тому воно також підтримує конфігурації портальних систем. Якщо ви використовуєте інші версії, повідомте про проблеми та/або рішення на форум LinuxCNC або http://www.cncecke.de/forum/showthread.php?t=78549 [Німецький форум CNC Ecke] або Список розсилки користувачів LinuxCNC.
Мінімальна роздільна здатність екрану для GMOCCAPY для нормального макета (без бічних панелей) становить 980 x 750 пікселів, тому вона повинна підходити для кожного стандартного екрану. Рекомендується використовувати екрани з мінімальною роздільною здатністю 1024x768. Існує також конфігурація, яка підходить для екранів 800x600 (введена в GMOCCAPY 3.4.8).
3. Як отримати GMOCCAPY
GMOCCAPY 3 входить до стандартного дистрибутива LinuxCNC починаючи з версії 2.7. Тому найпростіший спосіб отримати GMOCCAPY на ваш контрольний ПК — це просто завантажити ISO і встановити його з CD/DVD/USB-накопичувача. Це дозволить вам отримувати оновлення разом із звичайними пакетами Debian.
За посиланням: gmoccapy_release_notes.txt[нотатки до випуску], також відомим як список змін, ви можете відстежувати останні виправлення помилок та нові функції.
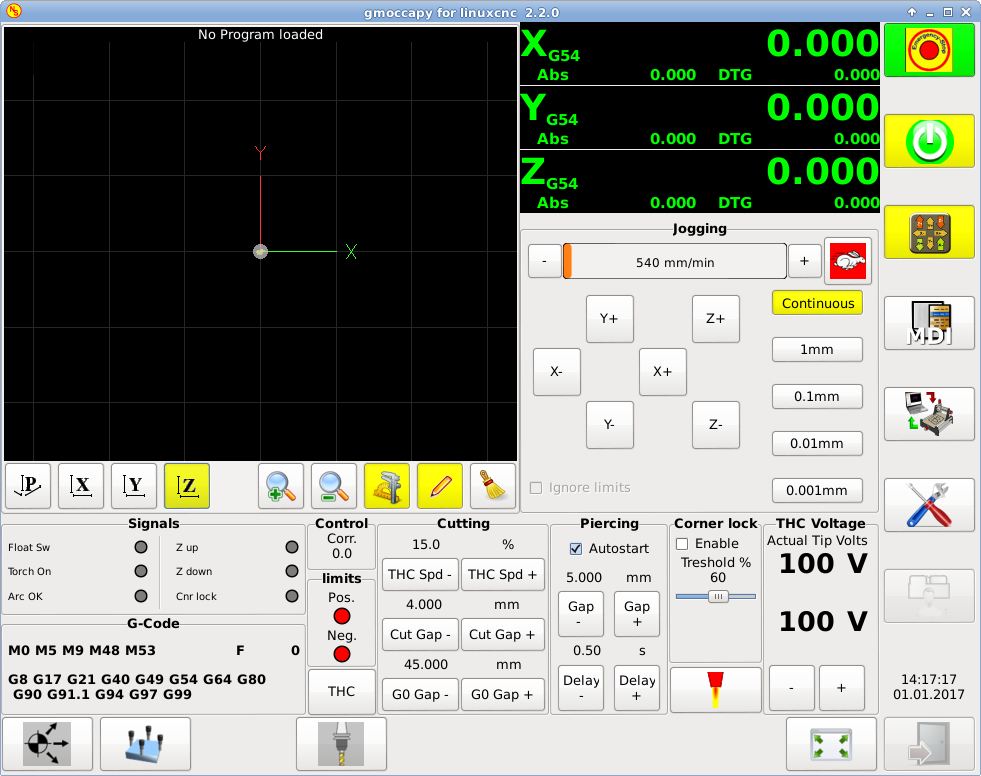
Ви отримаєте екран, подібний до наступного (дизайн може відрізнятися залежно від вашої конфігурації):
4. Базова конфігурація
GMOCCAPY 3 підтримує такі параметри командного рядка:
-
-user_mode: Якщо встановлено, кнопка налаштування буде вимкнена, тому звичайні оператори машини не зможуть редагувати її налаштування.
-
-logo <path to logo file>: Якщо вказано, логотип приховає вкладку кнопки поетапного перемикання в ручному режимі, це корисно лише для машин з апаратними кнопками для поетапного перемикання та вибору приросту.
Насправді для запуску GMOCCAPY не потрібно багато налаштовувати, але є деякі моменти, на які слід звернути увагу, якщо ви хочете використовувати всі можливості графічного інтерфейсу.
Ви знайдете багато конфігурацій симуляції (INI-файлів), просто щоб показати основи:
-
gmoccapy.ini
-
gmoccapy_4_axis.ini
-
lathe_configs/gmoccapy_lathe.ini
-
lathe_configs/gmoccapy_lathe_imperial.ini
-
gmoccapy_left_panel.ini
-
gmoccapy_right_panel.ini
-
gmoccapy_messages.ini
-
gmoccapy_pendant.ini
-
gmoccapy_sim_hardware_button.ini
-
gmoccapy_tool_sensor.ini
-
gmoccapy_with_user_tabs.ini
-
gmoccapy_XYZAB.ini
-
gmoccapy_XYZAC.ini
-
gmoccapy_XYZCW.ini
-
gmoccapy-JA/Gantry/gantry_mm.ini
-
gmoccapy-JA/scara/scara.ini
-
gmoccapy-JA/table-rotary-tilting/xyzac-trt.ini
-
і багато іншого…
Назви повинні пояснювати основне призначення різних INI-файлів.
Якщо ви використовуєте існуючу конфігурацію вашої машини, просто відредагуйте свій INI відповідно до цього документа.
Отже, давайте детальніше розглянемо INI-файл і те, що потрібно включити, щоб використовувати GMOCCAPY на вашому комп’ютері:
4.1. Розділ «ДИСПЛЕЙ»
[DISPLAY] DISPLAY = gmoccapy PREFERENCE_FILE_PATH = gmoccapy_preferences MAX_FEED_OVERRIDE = 1.5 MAX_SPINDLE_OVERRIDE = 1.2 MIN_SPINDLE_OVERRIDE = 0.5 DEFAULT_SPINDLE_SPEED = 500 LATHE = 1 BACK_TOOL_LATHE = 1 PROGRAM_PREFIX = ../../nc_files/
-
DISPLAY = gmoccapy - Це вказує LinuxCNC використовувати GMOCCAPY.
-
PREFERENCE_FILE_PATH - Вказує розташування та ім’я файлу налаштувань, який буде використовуватися. У більшості випадків цей рядок не буде потрібний, він використовується GMOCCAPY для зберігання ваших налаштувань графічного інтерфейсу, таких як теми, одиниці виміру DRO, кольори, налаштування клавіатури тощо. Детальніше див. settings page.
NoteЯкщо шлях або файл не вказані, GMOCCAPY буде використовувати за замовчуванням <your_machinename>.pref, якщо ім’я машини не вказано у вашому INI-файлі, він буде використовувати gmoccapy.pref. Файл буде збережений у вашому каталозі конфігурації, тому налаштування не будуть змішані, якщо ви використовуєте кілька конфігурацій. Якщо ви хочете використовувати один файл для декількох машин, вам потрібно включити PREFERENCE_FILE_PATHу ваш INI. -
MAX_FEED_OVERRIDE = 1.5 - Встановлює максимальне значення зміни подачі, у наведеному прикладі вам буде дозволено змінити подачу на 150%.
NoteЯкщо значення не вказано, буде встановлено значення 1.0. -
MIN_SPINDLE_OVERRIDE = 0.5 та MAX_SPINDLE_OVERRIDE = 1.2 - Дозволяє змінювати корекцію шпинделя в межах від 50% до 120%.
NoteЯкщо значення не вказано, MIN буде встановлено на 0,1, а MAX на 1,0. -
LATHE = 1 - Встановлює макет екрана для керування токарним верстатом.
-
BACK_TOOL_LATHE = 1 - є опціональним і перемикає вісь X так, як це потрібно для токарного верстата з задньою обробкою. Також клавіатурні скорочення будуть реагувати по-іншому. GMOCCAPY дозволяє налаштувати токарний верстат також з додатковими осями, тому ви можете використовувати також конфігурацію XZCW для токарного верстата.
TipДив. також Розділ. -
PROGRAM_PREFIX = ../../nc_files/ – це запис, який вказує LinuxCNC/GMOCCAPY, де шукати файли NGC.
NoteЯкщо не вказано, GMOCCAPY шукатиме файли NGC у такому порядку: спочатку linuxcnc/nc_files, а потім домашній каталог користувача. -
DEFAULT_SPINDLE_SPEED – Початкове значення для "Starting RPM", якщо значення відсутнє у файлі налаштувань або файл відсутній. Не матиме жодного ефекту з дійсним файлом налаштувань.
-
MIN_ANGULAR_VELOCITY – Встановлює мінімальну швидкість поштовхового переміщення верстата для обертових осей.
-
MAX_ANGULAR_VELOCITY – Встановлює максимальну швидкість поштовхового переміщення верстата для обертових осей.
-
DEFAULT_ANGULAR_VELOCITY – Встановлює швидкість поштовхового переміщення верстата за замовчуванням для обертових осей.
4.2. Розділ TRAJ
-
DEFAULT_LINEAR_VELOCITY = 85.0 - Встановлює швидкість поштовхового переміщення верстата за замовчуванням.
NoteЯкщо не встановлено, буде використано половину значення «MAX_LINEAR_VELOCITY». Якщо це значення також не вказано, значення за замовчуванням дорівнюватиме 180. -
MAX_LINEAR_VELOCITY = 230.0 - Встановлює максимальну швидкість верстата. Це значення також буде максимальною лінійною швидкістю поштовхового переміщення.
NoteЯкщо не встановлено, значення за замовчуванням становить 600.
4.3. Кнопки макросів
Ви можете додавати макроси до GMOCCAPY, подібно до способу Touchy. Макрос — це не що інше, як файл NGC. Ви можете виконувати повні програми CNC в режимі MDI, просто натиснувши одну кнопку. Для цього спочатку потрібно вказати шлях пошуку макросів:
Це встановлює шлях для пошуку макросів та інших підпрограм. Кілька шляхів до підпрограм можна розділяти символом ":".
Тоді вам просто потрібно додати такий розділ:
[MACROS] MACRO = i_am_lost MACRO = hello_world MACRO = jog_around MACRO = increment xinc yinc MACRO = go_to_position X-pos Y-pos Z-pos
Потім вам потрібно надати відповідні файли NGC, які повинні відповідати таким правилам:
-
Ім’я файлу має точно збігатися з ім’ям, зазначеним у рядку макросу, тільки з розширенням ".ngc" (враховуючи регістр).
-
Файл має містити підпрограму типу O<i_am_lost> sub, назва підпрограми має точно збігатися (з урахуванням регістру) з назвою макросу.
-
Файл має закінчуватися endsub O<i_am_lost> endsub, а потім командою M2.
-
Файли потрібно розмістити в папці, зазначеній у вашому INI-файлі за допомогою параметра «SUBROUTINE_PATH» у розділі RS274NGC
Код між sub та endsub буде виконано натисканням відповідної кнопки макросу.
|
Note
|
У графічному інтерфейсі буде показано максимум 16 макросів. Через обмеження місця може знадобитися натиснути на стрілку, щоб перейти на іншу сторінку і відобразити приховані кнопки макросів. Кнопки макросів будуть відображатися в порядку записів у файлі INI. Немає помилки в тому, щоб розмістити більше 16 макросів у файлі INI, просто вони не будуть показані. |
|
Note
|
Зразки макросів можна знайти в папці «macros», розташованій у папці GMOCCAPY sim. Якщо ви вказали кілька шляхів до підпрограм, вони будуть шукатися в порядку вказаних шляхів. Буде використано перший знайдений файл. |
GMOCCAPY також прийматиме макроси, що запитують параметри, такі як:
[MACROS] MACRO = go_to_position X-pos Y-pos Z-pos
Параметри мають бути розділені пробілами. У цьому прикладі викликається файл go_to_position.ngc з таким вмістом:
; Тестовий файл "перейти до позиції" ; перемістить машину в задану позицію O<go_to_position> sub G17 G21 G54 G61 G40 G49 G80 G90 ;#1 = <X-Pos> ;#2 = <Y-Pos> ;#3 = <Z-Pos> (НАЛАГОДЖЕННЯ, тепер буде переміщено машину до X = #1 , Y = #2 , Z = #3) G0 X #1 Y #2 Z #3 O<go_to_position> endsub M2
Після натискання кнопки виконати макрос вам буде запропоновано ввести значення для позиція X, позиція Y, позиція Z, і макрос буде виконано, лише якщо всі значення були введені.
|
Note
|
Якщо ви хочете використовувати макрос без будь-якого руху, див. також примітки в known problems. |

4.4. Вбудовані вкладки та панелі
Ви можете додавати вбудовані програми до GMOCCAPY, як це можна робити в AXIS, Touchy та Gscreen. GMOCCAPY робить все автоматично, якщо ви додасте кілька рядків до вашого INI-файлу в розділі DISPLAY.
Якщо ви ніколи не користувалися панеллю Glade, рекомендую ознайомитися з чудовою документацією за адресою Glade VCP.
EMBED_TAB_NAME = DRO EMBED_TAB_LOCATION = ntb_user_tabs EMBED_TAB_COMMAND = gladevcp -x {XID} dro.glade EMBED_TAB_NAME = Second user tab EMBED_TAB_LOCATION = ntb_preview EMBED_TAB_COMMAND = gladevcp -x {XID} vcp_box.glade
Все, про що вам потрібно подбати, це про те, щоб ви включили для кожної вкладки або бічної панелі згадані три рядки:
-
EMBED_TAB_NAME = Представляє назву вкладки або бічної панелі, вам вирішувати, яку назву використовувати, але вона має бути присутня!
-
EMBED_TAB_LOCATION = Місце, де буде розміщено вашу програму в графічному інтерфейсі, див. рисунок Розташування вбудованих вкладок. Дійсні значення:
-
ntb_user_tabs (як головна вкладка, що охоплює весь екран (7))
-
ntb_preview (як вкладка на стороні попереднього перегляду (1))
-
hbox_jog (приховає кнопки пробіжок та розмістить ваш файл Glade тут (2))
-
box_left (ліворуч, повна висота екрана (10))
-
box_right (праворуч, між звичайним екраном та списком кнопок (11))
-
box_tool_and_code_info (приховає інформацію про інструмент та кадри G-коду, а ваш файл glade буде розміщено тут (3))
-
box_tool_info (приховає рамку інформації про інструмент і розмістить тут ваш файл glade (3a))
-
box_code_info (приховає інформаційний кадр G-коду та розмістить тут ваш файл glade (3b))
-
box_vel_info (приховає кадри швидкості та введе ваш файл Glade (4))
-
box_coolant_and_spindle (приховає рамки охолоджувальної системи та шпинделя, а ваш файл Glade буде розміщено тут (5)+(6))
-
box_cooling (приховає рамку охолодження та введе ваш файл Glade (5))
-
box_spindle (приховає раму шпинделя та введе ваш напилок Glade (6))
-
box_custom_1 (представить ваш файл glade ліворуч від vel_frame)
-
box_custom_2 (представить ваш файл glade ліворуч від cooling_frame)
-
box_custom_3 (представить ваш файл glade ліворуч від spindle_frame)
-
box_custom_4 (опублікує ваш файл glade праворуч від spindle_frame)
-
box_dro_side (опублікую ваш файл Glade одразу від DRO (8))
-
ntb_setup (як вкладка на сторінці налаштувань (9))
-
|
Note
|
Дивіться також додані зразки INI-файлів, щоб побачити відмінності. |
-
EMBED_TAB_COMMAND = Команда для виконання, тобто.
gladevcp -x {XID} dro.gladeмістить користувацький файл glade під назвою dro.glade у зазначеному місці. Файл має бути поміщений у папку конфігурації вашого комп’ютера.
gladevcp h_buttonlist.gladeпросто відкриється нове вікно користувача під назвою h_buttonlist.glade, зверніть увагу на різницю. Це окреме вікно, яке можна переміщувати незалежно від вікна GMOCCAPY.
gladevcp -c gladevcp -u hitcounter.py -H manual-example.hal manual-example.uiдодасть панель manual-example.ui, включить власний обробник Python hitcounter.py та встановить усі з’єднання після реалізації панелі згідно з manual-example.hal.
hideприховає вибране поле.

|
Note
|
Якщо ви створюєте будь-які HAL-з’єднання з вашою власною панеллю Glade, вам потрібно зробити це у файлі HAL, вказаному в рядку EMBED_TAB_COMMAND, інакше ви можете отримати помилку про те, що HAL-контакт не існує — це відбувається через умови гонки при завантаженні файлів HAL. З’єднання з контактами GMOCCAPY HAL потрібно встановлювати у файлі postgui HAL, вказаному у вашому файлі INI, оскільки ці контакти не існують до реалізації графічного інтерфейсу користувача. |
Ось кілька прикладів:
ntb_preview
|
box_right - and GMOCCAPY in MDI mode
|


4.5. Повідомлення, створені користувачем
GMOCCAPY має можливість створювати повідомлення користувача, керовані HAL. Щоб використовувати їх, потрібно додати кілька рядків у розділ [DISPLAY] INI-файлу.
Ці три рядки потрібні для визначення спливаючого діалогового вікна повідомлення користувача:
MESSAGE_TEXT = Текст, який буде відображено, може бути відформатований за допомогою розмітки pango MESSAGE_TYPE = "status" , "okdialog" , "yesnodialog" MESSAGE_PINNAME = назва групи контактів HAL, яку потрібно створити
Повідомлення підтримують мову розмітки pango. Детальну інформацію про мову розмітки можна знайти за адресою Розмітка Pango.
Доступні такі три типи діалогових вікон:
-
status - Просто відобразить повідомлення у спливаючому вікні, використовуючи систему обміну повідомленнями GMOCCAPY.
-
okdialog - Фокус буде утримуватися на діалоговому вікні повідомлення та активуватиметься HAL-пін
-waiting. -
yesnodialog - Утримуватиме фокус на діалоговому вікні повідомлення та активуватиме HAL-пін
-waitingі надасть HAL-пін-response.
Для отримання детальнішої інформації про піни див. Піни HAL для повідомлень.
MESSAGE_TEXT = This is a <span background="#ff0000" foreground="#ffffff">info-message</span> test MESSAGE_TYPE = status MESSAGE_PINNAME = statustest MESSAGE_TEXT = Це тест діалогу «так/ні» MESSAGE_TYPE = yesnodialog MESSAGE_PINNAME = yesnodialog MESSAGE_TEXT = Текст може бути <small>малим</small>, <big>великим</big>, <b>жирним</b <i>курсивом</i> і навіть <span color="red">червоним</span>. MESSAGE_TYPE = okdialog MESSAGE_PINNAME = okdialog
|
Note
|
Наразі форматування не працює. |
4.6. Контроль попереднього перегляду
Магічні коментарі можуть використовуватися для управління попереднім переглядом G-коду. У дуже великих програмах попередній перегляд може завантажуватися досить довго. Ви можете контролювати, що відображається, а що приховується на графічному екрані, додаючи відповідні коментарі з цього списку до вашого G-коду:
(PREVIEW,hide)
<G-код, який буде приховано>
(PREVIEW,show)4.7. Файл команд користувача
Якщо файл ~/.gmoccapyrc існує, його вміст виконується як вихідний код Python одразу після відображення графічного інтерфейсу користувача. Деталі того, що може бути записано у файлі ~/.gmoccapyrc, можуть змінюватися протягом циклу розробки.
Специфічний для конфігурації файл Python може бути вказаний за допомогою параметра INI-файлу
[DISPLAY] USER_COMMAND_FILE=filename.py
Якщо цей файл вказано, його джерело буде отримано одразу після відображення графічного інтерфейсу GMOCCAPY замість ~/.gmoccapyrc.
У наступному прикладі змінюється розмір вертикальних кнопок: .Приклад файлу .gmoccapyrc
self.widgets.vbtb_main.set_size_request(85,-1) BB_SIZE = (70, 70) # default = (90, 56) self.widgets.tbtn_estop.set_size_request(*BB_SIZE) self.widgets.tbtn_on.set_size_request(*BB_SIZE) self.widgets.rbt_manual.set_size_request(*BB_SIZE) self.widgets.rbt_mdi.set_size_request(*BB_SIZE) self.widgets.rbt_auto.set_size_request(*BB_SIZE) self.widgets.tbtn_setup.set_size_request(*BB_SIZE) self.widgets.tbtn_user_tabs.set_size_request(*BB_SIZE) self.widgets.btn_exit.set_size_request(*BB_SIZE)
Назви віджетів можна знайти у файлі /usr/share/gmoccapy.glade
4.8. CSS-файл користувача
Подібно до файлу команд користувача, можна впливати на зовнішній вигляд за допомогою каскадних таблиць стилів (CSS). Якщо існує файл ~/.gmoccapy_css, його вміст завантажується в постачальник таблиць стилів і таким чином застосовується до графічного інтерфейсу користувача.
CSS-файл, що відповідає конфігурації, може бути вказаний за допомогою параметра INI-файлу
[DISPLAY] USER_CSS_FILE=filename.css
Якщо цей файл вказано, він використовується замість ~/.gmoccapy_css.
Інформацію про те, що можна контролювати за допомогою CSS, можна знайти тут: посилання: https://docs.gtk.org/gtk3/css-overview.html [Огляд CSS у GTK]
Ось приклад того, як можна встановити жовтий колір для позначених кнопок: .Приклад жовтого кольору для позначених кнопок
button:checked { background: rgba(250,230,0,0.8); }
4.9. Лісозаготівля
GMOCCAPY підтримує визначення рівня інформації (рівня журналу), який буде виведено на консоль та до файлу журналу.
Порядок такий: VERBOSE, DEBUG, INFO, WARNING, ERROR, CRITICAL. За замовчуванням — WARNING, це означає, що друкуються WARNING, ERROR та CRITICAL.
Ви можете вказати рівень журналу в INI-файлі таким чином:
[DISPLAY] DISPLAY = gmoccapy <log_level_param>
використовуючи ці параметри:
Рівень журналу <log_level_param>
DEBUG -d
INFO -i
VERBOSE -v
ERROR -q[DISPLAY] DISPLAY = gmoccapy -q
Ви можете вказати, де зберігати файл журналу:
[DISPLAY] LOG_FILE = gmoccapy.log
Якщо LOG_FILE не встановлено, логування відбувається у $HOME/<base_log_name>.log.
5. Піни HAL
GMOCCAPY експортує кілька виводів HAL, щоб мати змогу реагувати на апаратні пристрої. Мета полягає в тому, щоб отримати графічний інтерфейс, яким можна користуватися в інструментальній майстерні, повністю/переважно без миші чи клавіатури.
|
Note
|
Ви повинні виконати всі підключення до контактів GMOCCAPY у вашому файлі postgui.hal. Коли GMOCCAPY запускається, він створює контакти HAL для графічного інтерфейсу користувача, а потім виконує файл HAL після графічного інтерфейсу користувача, названий у файлі INI: [HAL] POSTGUI_HALFILE=<filename> Зазвичай |
5.1. Списки правої та нижньої кнопок
Екран має два основних списки кнопок: один праворуч, інший знизу. Праві кнопки не змінюються під час роботи, але список кнопок знизу змінюється дуже часто. Кнопки нумеруються зверху вниз і зліва направо, починаючи з 0.
|
Note
|
Назви контактів у GMOCCAPY 2 змінилися для кращого їхнього розташування. |
Контакти для правих (вертикальних) кнопок:
-
gmoccapy.v-button.button-0 (bit IN)
-
gmoccapy.v-button.button-1 (bit IN)
-
gmoccapy.v-button.button-2 (bit IN)
-
gmoccapy.v-button.button-3 (bit IN)
-
gmoccapy.v-button.button-4 (bit IN)
-
gmoccapy.v-button.button-5 (bit IN)
-
gmoccapy.v-button.button-6 (bit IN)
Для нижніх (горизонтальних) кнопок це:
-
gmoccapy.h-button.button-0 (bit IN)
-
gmoccapy.h-button.button-1 (bit IN)
-
gmoccapy.h-button.button-2 (bit IN)
-
gmoccapy.h-button.button-3 (bit IN)
-
gmoccapy.h-button.button-4 (bit IN)
-
gmoccapy.h-button.button-5 (bit IN)
-
gmoccapy.h-button.button-6 (bit IN)
-
gmoccapy.h-button.button-7 (bit IN)
-
gmoccapy.h-button.button-8 (bit IN)
-
gmoccapy.h-button.button-9 (bit IN)
Оскільки кнопки в нижньому списку змінюються залежно від режиму та інших факторів, апаратні кнопки активують відображені функції. Тому вам не потрібно турбуватися про перемикання функцій в HAL, оскільки це повністю виконує GMOCCAPY!
Для тривісного верстата XYZ контакти HAL реагуватимуть, як показано в наступних трьох таблицях:
| Закріпити | Ручний режим | Режим MDI | Автоматичний режим |
|---|---|---|---|
|
кнопка відкритого хомінгу |
macro 1 (якщо визначено) |
відкрити файл |
|
відкритий контактний матеріал |
macro 2 (якщо визначено) |
програма перезавантаження |
|
macro 3 (якщо визначено) |
запуск |
|
|
відкрити діалогові вікна інструментів |
macro 4 (якщо визначено) |
стій |
|
macro 5 (якщо визначено) |
пауза |
|
|
macro 6 (якщо визначено) |
крок за кроком |
|
|
macro 7 (якщо визначено) |
запускати з рядка, якщо це ввімкнено в налаштуваннях, інакше нічого |
|
|
macro 8 (якщо визначено) |
додаткові блоки |
|
|
повнорозмірний попередній перегляд |
макрос 9 або кнопка для відображення додаткових макросів |
повнорозмірний попередній перегляд |
|
вихід, якщо машина вимкнена, інакше нічого |
відкрити клавіатуру або перервати, якщо макрос запущено |
редагувати код |
| Закріпити | Режим налаштувань | Режим самонаведення | Режим вимкнення сенсорного керування |
|---|---|---|---|
|
видалити історію MDI |
редагувати зміщення |
|
|
всі будинки |
дотик X |
|
|
дотик Y |
||
|
головна сторінка x |
дотик Z |
|
|
відкриті класичні сходи |
головна сторінка y |
|
|
відкрита область HAL |
головна сторінка z |
|
|
відкритий стан HAL |
нуль G92 |
|
|
відкритий HAL-лічильник |
||
|
відкрите калібрування HAL |
зняти з дому все |
встановити вибране |
|
відкрите шоу HAL |
назад |
назад |
| Закріпити | Режим інструменту | Режим редагування | Виберіть файл |
|---|---|---|---|
|
інструмент(и) видалення |
перейти до домашнього каталогу |
|
|
новий інструмент |
перезавантажити файл |
на один рівень каталогу вище |
|
перезавантажити таблицю інструментів |
зберегти |
|
|
застосувати зміни |
зберегти як |
перемістити виділення ліворуч |
|
зміна інструменту за номером T? M6 |
перемістити виділення праворуч |
|
|
встановити інструмент за номером без змін M61 Q? |
перейти до каталогу, як встановлено в налаштуваннях |
|
|
змінити інструмент на вибраний |
новий файл |
|
|
вибрати / ENTER |
||
|
дотик інструменту по Z |
показати клавіатуру |
|
|
назад |
назад |
назад |
Отже, у нас є 67 реакцій лише з 10 HAL-пінами!
Ці контакти доступні для використання екрану без сенсорної панелі або для захисту його від надмірного використання шляхом розміщення апаратних кнопок навколо панелі. Вони доступні в зразковій конфігурації, як показано на зображенні image below.

5.2. Швидкості та корекції
Всі повзунки від GMOCCAPY можна підключити до апаратних енкодерів або апаратних потенціометрів.
|
Note
|
У GMOCCAPY 3 деякі назви контактів HAL змінилися після впровадження нових елементів керування. Максимальної швидкості більше не існує, її замінили швидким перевизначенням через вимоги багатьох користувачів. |
Для підключення енкодерів експортуються такі контакти:
-
gmoccapy.jog.jog-velocity.counts (s32 IN) - Швидкість штовхання
-
gmoccapy.jog.jog-velocity.count-enable (bit IN) - Має бути значення True, щоб увімкнути підрахунок
-
gmoccapy.feed.feed-override.counts (s32 IN) - перевизначення подачі
-
gmoccapy.feed.feed-override.count-enable (bit IN) - Має бути значення True, щоб увімкнути підрахунок
-
gmoccapy.feed.reset-feed-override (bit IN) - скинути перевизначення подачі до 0%
-
gmoccapy.spindle.spindle-override.counts (s32 IN) - корекція шпинделя
-
gmoccapy.spindle.spindle-override.count-enable (bit IN) - Має бути значення True, щоб увімкнути підрахунок
-
gmoccapy.spindle.reset-spindle-override (bit IN) - скинути корекцію шпинделя до 0%
-
gmoccapy.rapid.rapid-override.counts (s32 IN) - Максимальна швидкість машини
-
gmoccapy.rapid.rapid-override.count-enable (bit IN) - Має бути значення True, щоб увімкнути підрахунок
Для підключення потенціометрів використовуйте такі контакти:
-
gmoccapy.jog.jog-velocity.direct-value (float IN) - Щоб налаштувати повзунок швидкості джогу
-
gmoccapy.jog.jog-velocity.analog-enable (bit IN) - Має бути значення «True», щоб дозволити аналогові входи
-
gmoccapy.feed.feed-override.direct-value (float IN) - Щоб налаштувати повзунок корекції подачі
-
gmoccapy.feed.feed-override.analog-enable (bit IN) - Має бути значенням True, щоб дозволити аналогові входи
-
gmoccapy.spindle.spindle-override.direct-value (float IN) - Щоб налаштувати повзунок корекції шпинделя
-
gmoccapy.spindle.spindle-override.analog-enable (bit IN) - Має бути значенням True, щоб дозволити аналогові входи
-
gmoccapy.rapid.rapid-override.direct-value (float) - Щоб налаштувати повзунок максимальної швидкості
-
gmoccapy.rapid.rapid-override.analog-enable (bit IN) - Має бути значення «True», щоб дозволити аналогові входи
Крім того, GMOCCAPY 3 пропонує додаткові контакти HAL для керування новими слайдер-віджетами за допомогою миттєвих перемикачів. Значення швидкості збільшення або зменшення необхідно встановити у файлі glade. У майбутній версії це буде інтегровано на сторінці налаштувань.
-
gmoccapy.spc_jog_vel.increase (bit IN) - Доки значення True, значення повзунка збільшуватиметься
-
gmoccapy.spc_jog_vel.decrease (bit IN) - Доки значення True, значення повзунка зменшуватиметься
-
gmoccapy.spc_jog_vel.scale (float IN) - Значення для масштабування вихідного значення (зручно для зміни одиниць/хв на одиниці/с)
-
gmoccapy.spc_jog_vel.value (float OUT) - Значення віджета
-
gmoccapy.spc_jog_vel.scaled-value (float OUT) - Масштабоване значення віджета
-
gmoccapy.spc_feed.increase (bit IN) - Доки значення True, значення повзунка збільшуватиметься
-
gmoccapy.spc_feed.decrease (bit IN) - Доки значення True, значення повзунка зменшуватиметься
-
gmoccapy.spc_feed.scale (float IN) - Значення для масштабування вихідного значення (зручно для зміни одиниць/хв на одиниці/с)
-
gmoccapy.spc_feed.value (float OUT) - Значення віджета
-
gmoccapy.spc_feed.scaled-value (float OUT) - Масштабоване значення віджета
-
gmoccapy.spc_spindle.increase (bit IN) - Доки значення True, значення повзунка збільшуватиметься
-
gmoccapy.spc_spindle.decrease (bit IN) - Доки значення True, значення повзунка зменшуватиметься
-
gmoccapy.spc_spindle.scale (float IN) - Значення для масштабування вихідного значення (зручно для зміни одиниць/хв на одиниці/с)
-
gmoccapy.spc_spindle.value (float OUT) - Значення віджета
-
gmoccapy.spc_spindle.scaled-value (float OUT) - Масштабоване значення віджета
-
gmoccapy.spc_rapid.increase (bit IN) - Доки значення True, значення повзунка збільшуватиметься
-
gmoccapy.spc_rapid.decrease (bit IN) - Доки значення True, значення повзунка зменшуватиметься
-
gmoccapy.spc_rapid.scale (float IN) - Значення для масштабування вихідного значення (зручно для зміни одиниць/хв на одиниці/с)
-
gmoccapy.spc_rapid.value (float OUT) - Значення віджета
-
gmoccapy.spc_rapid.scaled-value (float OUT) - Масштабоване значення віджета
Піни з плаваючою точкою приймають значення від 0,0 до 1,0, що є відсотковим значенням, яке потрібно встановити для значення повзунка.
|
Warning
|
Якщо ви використовуєте обидва типи з’єднання, не підключайте один і той же повзунок до обох контактів, оскільки взаємодія між ними не була перевірена! Різні повзунки можуть бути підключені до одного або іншого типу з’єднання HAL. |
|
Important
|
Зверніть увагу, що швидкість переміщення залежить від стану кнопки черепахи. Це призведе до різних шкал повзунка залежно від режиму (черепаха або кролик). Для отримання додаткової інформації див. також jog velocities and turtle-jog HAL pin. |
Мінімальне значення перевищення шпинделя = 20 %
Максимальне значення перевищення шпинделя = 120 %
gmoccapy.analog-enable = 1
gmoccapy.spindle-override-value = 0,25
значення, яке потрібно встановити = мінімальне значення + (максимальне значення - мінімальне значення) * gmoccapy.spindle-override-value
значення, яке потрібно встановити = 20 + (120 - 20) * 0,25
значення, яке потрібно встановити = 45 %
5.3. Jog HAL Pins
Усі осі, зазначені в INI-файлі, мають контакти jog-plus та jog-minus, тому для штовхання осей можна використовувати апаратні миттєві перемикачі.
|
Note
|
Назви цих HAL-пінів змінилися в GMOCCAPY 2. |
Для стандартної конфігурації XYZ будуть доступні такі HAL-піни:
-
gmoccapy.jog.axis.jog-x-plus (bit IN)
-
gmoccapy.jog.axis.jog-x-minus (bit IN)
-
gmoccapy.jog.axis.jog-y-plus (bit IN)
-
gmoccapy.jog.axis.jog-y-minus (bit IN)
-
gmoccapy.jog.axis.jog-z-plus (bit IN)
-
gmoccapy.jog.axis.jog-z-minus (bit IN)
Якщо ви використовуєте конфігурацію з 4 осями, будуть два додаткові контакти:
-
gmoccapy.jog.jog-<your fourth axis letter >-plus (bit IN)
-
gmoccapy.jog.jog-<your fourth axis letter >-minus (bit IN)
Для осі C ви побачите:
-
gmoccapy.jog.axis.jog-c-plus (bit IN)
-
gmoccapy.jog.axis.jog-c-minus (bit IN)
5.4. Швидкості поштовху та штифт HAL Turtle-Jog
Швидкість переміщення можна вибрати за допомогою відповідного повзунка. Шкала повзунка буде змінена, якщо кнопка черепахи (та, що показує кролика або черепаху) була переключена. Якщо кнопка не видна, вона, можливо, була вимкнена на сторінці settings. Якщо на кнопці зображено кролика, шкала відображає швидкість від мінімальної до максимальної. Якщо на ній зображено черепаху, шкала за замовчуванням досягає лише 1/20 від максимальної швидкості. Використовуваний дільник можна налаштувати на сторінці settings.
Тож за допомогою сенсорного екрана набагато легше вибирати менші швидкості.
GMOCCAPY пропонує цей HAL-штифт для перемикання між бігом у формі черепахи та кролика:
-
gmoccapy.jog.turtle-jog (bit IN)
5.5. Штифти HAL для приросту поштовху
Приріст поштовху, вказаний у INI-файлі, наприклад
[DISPLAY] INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm
можна вибрати за допомогою контактів HAL, тому для вибору кроку можна використовувати апаратний перемикач. Для кроків, зазначених у файлі INI, буде доступно максимум 10 контактів HAL. Якщо у файлі INI вказано більше кроків, вони не будуть доступні з графічного інтерфейсу, оскільки не відображатимуться.
Якщо у вашому INI-файлі є 6 приростів, як у наведеному вище прикладі, ви отримаєте 7 контактів:
-
gmoccapy.jog.jog-inc-0 (bit IN) - Цей фіксований і представлятиме безперервний біг підтюпцем.
-
gmoccapy.jog.jog-inc-1 (bit IN) - Перший приріст, заданий у INI-файлі.
-
gmoccapy.jog.jog-inc-2 (bit IN)
-
gmoccapy.jog.jog-inc-3 (bit IN)
-
gmoccapy.jog.jog-inc-4 (bit IN)
-
gmoccapy.jog.jog-inc-5 (bit IN)
-
gmoccapy.jog.jog-inc-6 (bit IN)
GMOCCAPY також пропонує вивід HAL для виведення вибраного приросту поштовхової передачі:
-
gmoccapy.jog.jog-increment (float OUT)
5.6. PIN-код для розблокування апаратного забезпечення
Щоб мати змогу використовувати ключовий перемикач для розблокування сторінки налаштувань, експортується наступний PIN-код:
-
gmoccapy.unlock-settings (bit IN) - Сторінка налаштувань розблоковується, якщо PIN-код має високий рівень. Щоб використовувати цей PIN-код, потрібно активувати його на сторінці налаштувань.
5.7. Піни помилок/попереджень
-
gmoccapy.error (bit OUT) - Вказує на помилку, тому може загорітися індикатор, або навіть машина може бути зупинена. Скидання налаштувань буде здійснено за допомогою PIN-коду
gmoccapy.delete-message. -
gmoccapy.delete-message (bit IN) - Видалить першу помилку та скине значення
gmoccapy.errorу значення false після усунення останньої помилки. -
gmoccapy.warning-confirm (bit IN) - Підтверджує діалогове вікно попередження, наприклад, натискання кнопки «ОК»
|
Note
|
Повідомлення або інформація про користувача не вплинуть на пін-код |
5.8. Піни HAL, створені користувачем, для повідомлень
GMOCCAPY можна налаштувати для реагування на зовнішні помилки, використовуючи 3 різні повідомлення користувача:
-
gmoccapy.messages.status (bit IN) - Запускає діалог.
-
gmoccapy.messages.okdialog (bit IN) - Запускає діалог.
-
gmoccapy.messages.okdialog-waiting (bit OUT) - Буде «1», поки діалогове вікно відкрите. Закриття повідомлення скине цей контакт.
-
gmoccapy.messages.yesnodialog (bit IN) - Запускає діалог.
-
gmoccapy.messages.yesnodialog-waiting (bit OUT) - Буде «1», поки діалогове вікно відкрите. Закриття повідомлення скине цей контакт.
-
gmoccapy.messages.yesnodialog-response (bit OUT) - Цей пін-код зміниться на «1», якщо користувач натисне «ОК», а в усіх інших випадках він буде «0». Цей пін-код залишатиметься «1», доки діалогове вікно не буде викликано знову.
Щоб додати повідомлення, створене користувачем, потрібно додати його до INI-файлу в розділі DISPLAY. Див. Налаштування повідомлень.
MESSAGE_TEXT = LUBE FAULT MESSAGE_TYPE = okdialog MESSAGE_PINNAME = lube-fault MESSAGE_TEXT = X SHEAR PIN BROKEN MESSAGE_TYPE = status MESSAGE_PINNAME = pin
Щоб підключити ці нові контакти, потрібно зробити це у HAL-файлі postgui. Ось кілька прикладів підключень, які з’єднують сигнали повідомлень з деяким іншим місцем у HAL-файлі.
net gmoccapy-lube-fault gmoccapy.messages.lube-fault net gmoccapy-lube-fault-waiting gmoccapy.messages.lube-fault-waiting net gmoccapy-pin gmoccapy.messages.pin
Для отримання додаткової інформації про файли HAL та команду net див. Основи HAL.
5.9. Штифти зворотного зв’язку шпинделя
Є два контакти для зворотного зв’язку шпинделя:
-
gmoccapy.spindle_feedback_bar (float IN) - Закріпіть, щоб показати швидкість шпинделя на шпиндельній планці.
-
gmoccapy.spindle_at_speed_led (bit IN) - Підключіть, щоб увімкнути світлодіод, що показує швидкість.
5.10. Шпильки для відображення інформації про хід виконання програми
Є три піктограми, які надають інформацію про хід виконання програми:
-
gmoccapy.program.length (s32 OUT) - Показує загальну кількість рядків програми.
-
gmoccapy.program.current-line (s32 OUT) - Вказує поточний робочий рядок програми.
-
gmoccapy.program.progress (float OUT) - Показує прогрес програми у відсотках.
Значення можуть бути не дуже точними, якщо ви працюєте з підпрограмами або великими процедурами перепризначення. Також цикли призводитимуть до різних значень.
5.11. Штифти, пов’язані з інструментами
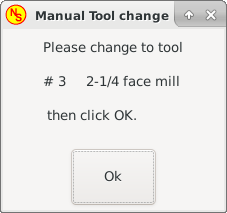
Ці контакти призначені для використання внутрішнього діалогового вікна зміни інструменту GMOCCAPY, схожого на те, що відоме з AXIS, але з декількома модифікаціями. Таким чином, ви отримаєте не тільки повідомлення про зміну на «інструмент № 3», але й опис цього інструменту, наприклад «7,5 мм 3-різцевий фрезер». Інформація береться з таблиці інструментів, тому ви самі вирішуєте, що відображати.
-
gmoccapy.toolchange-number (s32 IN) - Номер інструменту, який потрібно замінити
-
gmoccapy.toolchange-change (bit IN) - Означає, що інструмент потрібно замінити
-
gmoccapy.toolchange-changed (bit OUT) - Вказує на зміну інструменту
-
gmoccapy.toolchange-confirm (bit IN) - Підтверджує зміну інструменту
Зазвичай для ручної зміни інструменту їх з’єднують так:
net tool-change gmoccapy.toolchange-change <= iocontrol.0.tool-change net tool-changed gmoccapy.toolchange-changed <= iocontrol.0.tool-changed net tool-prep-number gmoccapy.toolchange-number <= iocontrol.0.tool-prep-number net tool-prep-loop iocontrol.0.tool-prepare <= iocontrol.0.tool-prepared
|
Note
|
Будь ласка, зверніть увагу, що ці з’єднання мають бути виконані у HAL-файлі postgui. |
Ці контакти дозволяють відображати значення активного зміщення інструменту для X та Z у фреймі інформації про інструмент. Слід знати, що вони активні лише після надсилання G43.

-
gmoccapy.tooloffset-x (float IN)
-
gmoccapy.tooloffset-z (float IN)
|
Note
|
Рядок tooloffset-x не потрібен на фрезерному верстаті та не відображатиметься на фрезерному верстаті з тривіальною кінематикою. |
Щоб відобразити поточні зміщення, піни повинні бути з’єднані ось так у HAL-файлі postgui:
net tooloffset-x gmoccapy.tooloffset-x <= motion.tooloffset.x net tooloffset-z gmoccapy.tooloffset-z <= motion.tooloffset.z
|
Important
|
Зверніть увагу, що GMOCCAPY самостійно оновлює компенсації, надсилаючи G43 після кожної зміни інструменту, але не в автоматичному режимі! Тому під час написання програми ви повинні включити G43 після кожної зміни інструменту! |
6. Автоматичне вимірювання інструментів
GMOCCAPY пропонує інтегрований інструмент для вимірювання автомобілів. Щоб скористатися цією функцією, вам потрібно буде виконати деякі додаткові налаштування, і, можливо, ви захочете використовувати запропонований контакт HAL, щоб отримати значення у власній процедурі перерозподілу NGC.
|
Important
|
Перед початком першого тесту не забудьте ввести висоту зонда та швидкості зонда на сторінці налаштувань! Див. Сторінка налаштувань Вимірювання інструмента. |
Також було б гарною ідеєю переглянути відео про вимірювання інструментів, див. tool measurement related videos.
Вимірювання інструментів у GMOCCAPY виконується дещо інакше, ніж у багатьох інших графічних інтерфейсах. Вам слід виконати такі кроки:
-
Прикладіть до заготовки контакти по осях X та Y.
-
Виміряйте висоту вашого блоку від основи, де розташований перемикач інструментів, до верхньої поверхні блоку (включаючи патрон тощо).
-
Натисніть кнопку висоти блоку та введіть виміряне значення.
-
Перейдіть в автоматичний режим і запустіть програму.
Ось невеликий ескіз:
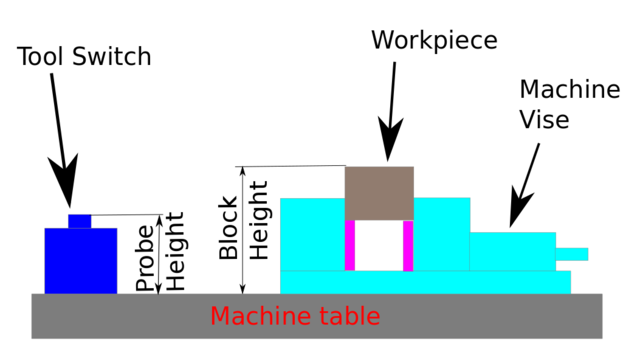
При першій заміні інструменту інструмент буде виміряний, а зміщення буде встановлено автоматично відповідно до висоти блоку. Перевага методу GMOCCAPY полягає в тому, що вам не потрібен еталонний інструмент.
|
Note
|
Ваша програма повинна містити зміну інструменту на початку! Інструмент буде виміряний, навіть якщо він вже використовувався раніше, тому немає небезпеки, якщо висота блоку змінилася. На YouTube є кілька відео, що показують, як це зробити. |
6.1. Надані піни
GMOCCAPY пропонує п’ять виводів для вимірювання інструментів. Ці виводи здебільшого використовуються для зчитування з підпрограми G-коду, тому код може реагувати на різні значення.
-
gmoccapy.toolmeasurement (bit OUT) - Увімкнути або вимкнути вимірювання інструменту
-
gmoccapy.blockheight (float OUT) - Виміряне значення верхньої грані заготовки
-
gmoccapy.probeheight (float OUT) - Висота перемикача зонда
-
gmoccapy.searchvel (float OUT) - Швидкість пошуку перемикача зонда інструменту
-
gmoccapy.probevel (float OUT) - Швидкість до довжини зонду інструменту
6.2. Модифікації INI-файлу
Змініть свій INI-файл, включивши до нього наступні розділи.
[RS274NGC] # це підфункція, яка викликається, коли виникає помилка під час зміни інструменту, не потрібна для кожної конфігурації верстата ON_ABORT_COMMAND=O <on_abort> call # Код перепризначення REMAP=M6 modalgroup=6 prolog=change_prolog ngc=change epilog=change_epilog
|
Note
|
Переконайтеся, що INI_VARS та HAL_PIN_VARS не встановлені на 0. За замовчуванням вони встановлені на 1. |
Положення датчика інструменту та початкове положення зондувального руху, всі значення є абсолютними координатами, окрім MAXPROBE, яке має бути задане у відносному русі.
[TOOLSENSOR] X = 10 Y = 10 Z = -20 MAXPROBE = -20
Це навмисно не називається TOOL_CHANGE_POSITION — Canon використовує цю назву, і в іншому випадку це спричинить конфлікт. Позиція, в яку потрібно перемістити верстат перед тим, як дати команду на зміну інструменту. Усі значення вказані в абсолютних координатах.
[CHANGE_POSITION] X = 10 Y = 10 Z = -2
Плагіни Python обслуговують інтерпретаторів та задач.
[PYTHON] # Шлях для початку пошуку користувацьких модулів PATH_PREPEND = python # Відправна точка для всіх. TOPLEVEL = python/toplevel.py
6.3. Необхідні файли
Спочатку створіть каталог "python" у вашій папці config. Зі <каталог_ваш_лінуксцнц-розробника>/configs/sim/gmoccapy/python скопіюйте наступні файли у щойно створену папку config_dir/python:
-
toplevel.py -
remap.py -
stdglue.py
З копії <your_linuxcnc-dev_directory>/configs/sim/gmoccapy/macros
-
on_abort.ngc -
change.ngc
до каталогу, вказаного як SUBROUTINE_PATH, див. RS274NGC.
Відкрийте change.ngc за допомогою редактора та розкоментуйте наступні рядки (49 та 50):
F #<_hal[gmoccapy.probevel]> G38.2 Z-4
Можливо, ви захочете змінити цей файл, щоб він більше відповідав вашим потребам.
6.4. Необхідні HAL-з’єднання
Підключіть зонд інструменту у вашому HAL-файлі таким чином:
net probe motion.probe-input <= <your_input_pin>
Рядок може виглядати так:
net probe motion.probe-input <= parport.0.pin-15-in
У вашому файлі postgui.hal додайте такі рядки:
# Наступні рядки потрібні лише в тому випадку, якщо контакти були підключені раніше. unlinkp iocontrol.0.tool-change unlinkp iocontrol.0.tool-changed unlinkp iocontrol.0.tool-prep-number unlinkp iocontrol.0.tool-prepared # посилання на зміну інструменту GMOCCAPY, що дозволяє переглядати опис інструменту в діалоговому вікні зміни net tool-change gmoccapy.toolchange-change <= iocontrol.0.tool-change net tool-changed gmoccapy.toolchange-changed => iocontrol.0.tool-changed net tool-prep-number gmoccapy.toolchange-number <= iocontrol.0.tool-prep-number net tool-prep-loop iocontrol.0.tool-prepare <= iocontrol.0.tool-prepared
7. Сторінка налаштувань
Щоб увійти на сторінку, вам потрібно натиснути на зображення:images/gmoccapy_settings_button.png[align="left"] і ввести код розблокування, який за замовчуванням є 123. Якщо ви хочете змінити його в цей момент, вам потрібно буде відредагувати прихований файл налаштувань, детальніше див. розділ дисплея.
Сторінка розділена на три основні вкладки:
7.1. Зовнішній вигляд
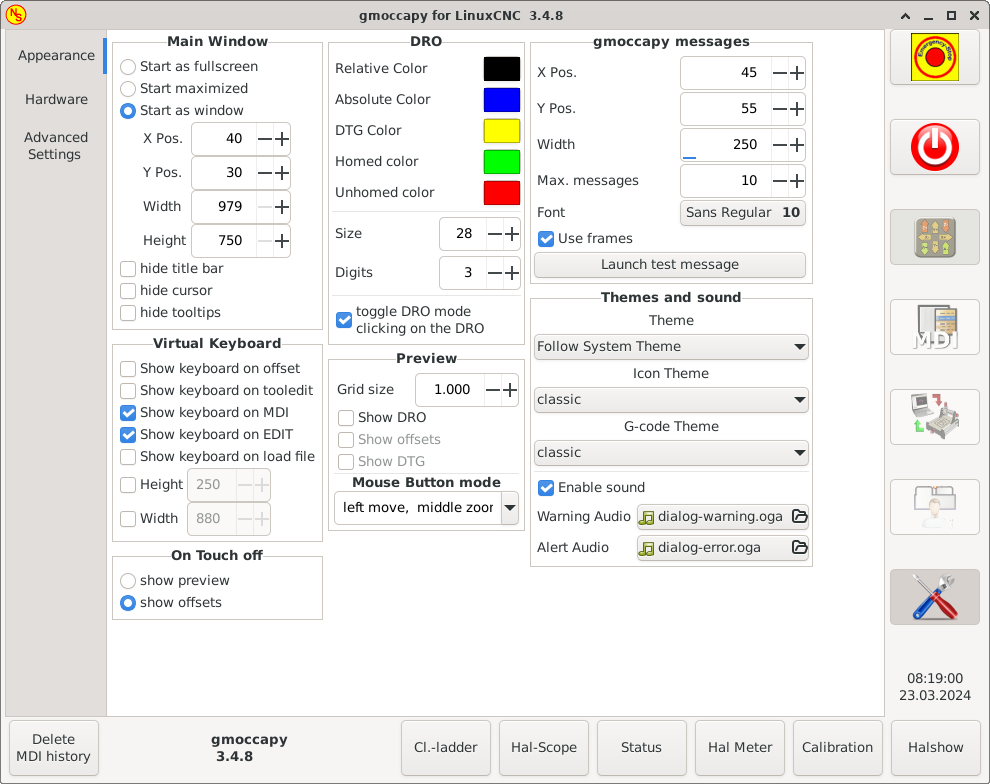
На цій вкладці ви знайдете такі опції:
Тут ви можете вибрати, як ви хочете запускати графічний інтерфейс. Головною причиною цього було бажання надати користувачеві простий спосіб налаштування параметрів запуску без необхідності втручання в код. У вас є три варіанти:
-
Почати в повноекранному режимі
-
Почати розгорнутий
-
Запустити як вікно - Якщо ви виберете «Запустити як вікно», поля для введення позиції та розміру стануть активними. Після одноразового налаштування графічний інтерфейс буде запускатися щоразу у вибраному місці та з вибраним розміром. Проте користувач може змінювати розмір та позицію за допомогою миші, але це не вплине на налаштування.
-
hide title bar - Дозволяє приховати рядок заголовка. (за замовчуванням: рядок заголовка видимий).
-
hide cursor - Дозволяє приховати курсор, що дуже корисно, якщо ви використовуєте сенсорний екран.
-
hide tooltips - Приховує підказки.
Прапорці дозволяють користувачеві вибрати, чи хоче він, щоб вбудована клавіатура відображалася відразу при вході в режим MDI, на сторінці зміщення, у віджеті редагування інструментів або при відкритті програми в режимі EDIT. Ці налаштування не впливають на кнопку клавіатури в нижньому списку кнопок, тому ви можете показувати або приховувати клавіатуру, натискаючи цю кнопку.
Налаштування за замовчуванням:
-
Показати клавіатуру зі зміщенням = False
-
Показати клавіатуру в tooledit = False
-
Показати клавіатуру на MDI = True
-
Показати клавіатуру під час РЕДАГУВАННЯ = True
-
Показувати клавіатуру під час завантаження файлу = False
|
Note
|
Якщо цей розділ не є чутливим, у вас не встановлено віртуальну клавіатуру, підтримувані onboard та matchbox-keyboard. |
|
Note
|
Якщо розкладка клавіатури неправильна, тобто натискання клавіші Y дає Z, то розкладка не налаштована належним чином відповідно до ваших локальних налаштувань. Для вбудованої клавіатури це можна вирішити за допомогою невеликого командного файлу з таким вмістом: Літери «de» відповідають німецькій мові, їх потрібно налаштувати відповідно до ваших локальних налаштувань. Просто запустіть цей файл перед запуском LinuxCNC, це також можна зробити, додавши стартовий файл до вашої локальної папки. Щоб макет встановлювався автоматично під час запуску. Для клавіатури Matchbox вам доведеться створити власну розкладку, для німецької розкладки запитайте на форумі. |

Це дає можливість відображати вкладку попереднього перегляду чи вкладку зміщеної сторінки, коли ви переходите в режим дотику натисканням відповідної нижньої кнопки.
-
показати попередній перегляд
-
показати зміщення
Ви маєте можливість вибрати кольори фону для різних станів DRO. Таким чином, користувачі, які страждають на протанопію (слабкість червоного/зеленого), можуть вибрати відповідні кольори.
За замовчуванням кольори фону:
-
Відносний колір = чорний
-
Абсолютний колір = синій
-
DTG Color = жовтий
Колір переднього плану DRO можна вибрати за допомогою:
-
Колір _Homed = зелений
-
Неприхований колір = червоний
|
Note
|
Ви можете змінювати режими DRO (абсолютний, відносний, відстань до кінця) натискаючи на цифру на DRO! Якщо ви натиснете на літеру зліва від DRO, з’явиться спливаюче вікно, в якому ви зможете встановити значення осей, що спростить процес налаштування, оскільки вам не доведеться натискати на кнопку «touch off bottom». |
-
size - Дозволяє встановити розмір шрифту DRO, за замовчуванням - 28, якщо ви використовуєте більший екран, ви можете збільшити розмір до 56. Якщо ви використовуєте 4 осі, розмір шрифту DRO буде 3/4 від значення, через обмеження простору.
-
digits - Встановлює кількість цифр указівника від 1 до 5.
NoteІмперські одиниці вимірювання показуватимуть на одну цифру більше, ніж метричні. Тож, якщо ви використовуєте імперські одиниці вимірювання та встановите значення цифри на 1, ви взагалі не отримаєте жодної цифри в метричних одиницях.
-
toggle DRO mode - Якщо неактивний, клацання мишею на DRO не призведе до жодних дій.
За замовчуванням цей прапорець активний, тому кожне клацання на будь-якому DRO перемикає показання DRO з фактичного на відносне до DTG (відстань до кінця).
Проте клацання на літері осі відкриє спливаюче діалогове вікно для встановлення значення осі.
-
Grid Size - Встановлює розмір сітки вікна попереднього перегляду. На жаль, розмір потрібно встановлювати в дюймах, навіть якщо ваші одиниці вимірювання метричні. Ми сподіваємося виправити це в майбутньому випуску.
NoteСітка не буде відображатися в перспективі. -
Show DRO - DRO також відображатиметься на панелі попереднього перегляду, він завжди відображатиметься в повнорозмірному режимі.
-
Show DTG - Відображатиме DTG (пряму відстань до кінцевої точки) на панелі попереднього перегляду, якщо активовано параметр «Показати DRO». В іншому випадку – лише в режимі попереднього перегляду в повному розмірі.
-
Show Offsets - Зміщення відображатимуться на панелі попереднього перегляду, коли активовано параметр «Показати DRO». В іншому випадку – лише в режимі попереднього перегляду в повному розмірі.
-
Mouse Button Mode - Це випадаюче поле дозволяє вибрати поведінку кнопок миші для обертання, переміщення або масштабування в попередньому перегляді:
-
поворот ліворуч, рух посередині, масштабування праворуч
-
масштабування ліворуч, рух посередині, поворот праворуч
-
ліворуч, поворот посередині, масштабування праворуч
-
масштабування ліворуч, поворот посередині, рух праворуч
-
ліворуч, масштабування посередині, поворот праворуч
-
поворот ліворуч, масштабування посередині, рух праворуч
-
За замовчуванням: рух ліворуч, масштабування посередині, поворот праворуч.
Коліщатко миші все одно масштабуватиме попередній перегляд у будь-якому режимі.
|
Tip
|
Якщо ви оберете елемент у попередньому перегляді, вибраний елемент буде прийнято як центр обертання, а в автоматичному режимі відповідний рядок коду буде виділено. |
Це призведе до появи невеликих спливаючих вікон із повідомленням або текстом про помилку, подібних до тих, що відомі з AXIS. Ви можете видалити конкретне повідомлення, натиснувши кнопку закриття. Якщо ви хочете видалити останнє повідомлення, просто натисніть клавішу WINDOWS на клавіатурі або видаліть усі повідомлення одночасно за допомогою комбінації клавіш Control + Space.
Ви можете встановити деякі опції:
-
X Pos - Положення верхнього лівого кута повідомлення в X, відлічене в пікселях від верхнього лівого кута екрана.
-
Y Pos - Положення верхнього лівого кута повідомлення по осі Y, відліковане в пікселях від верхнього лівого кута екрана.
-
Width - Ширина вікна повідомлення.
-
Max. messages - Максимальна кількість повідомлень, які ви хочете бачити одночасно. Якщо встановити значення 10, 11-те повідомлення видалить перше, тож ви побачите лише останні 10.
-
Font - Шрифт і розмір, які ви хочете використовувати для відображення повідомлень.
-
Use frames - Якщо ви активуєте прапорець, кожне повідомлення відображатиметься в рамці, тому розрізняти повідомлення буде набагато легше. Але вам знадобиться трохи більше місця.
-
Кнопка «Запустити тестове повідомлення» – вона відобразить повідомлення, щоб ви могли побачити зміни ваших налаштувань без необхідності генерувати помилку.
Це дозволяє користувачеві вибрати тему робочого столу та звуки помилок і повідомлень, які слід відтворювати.
За замовчуванням встановлено опцію «Дотримуватися системної теми».
Також дозволяє змінювати тему іконок. Наразі доступні три теми:
-
класичний
-
матеріал
-
матеріал світло
Щоб створити власні теми значків, див. розділ Тема значків для отримання детальної інформації.
7.2. Апаратне забезпечення
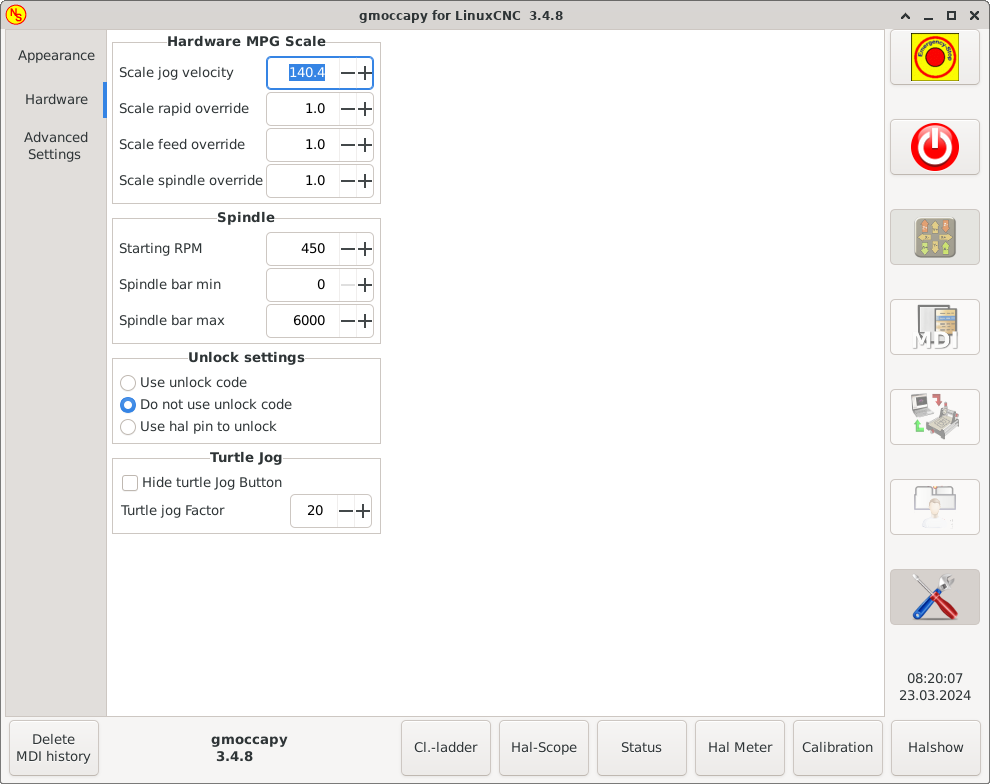
Для різних контактів HAL, до яких підключаються колеса MPG, можна вибрати окремі шкали, які будуть застосовуватися. Головною причиною цього було моє власне тестування для вирішення цієї проблеми за допомогою підключень HAL, що призвело до створення дуже складного файлу HAL. Уявіть, що користувач має колесо MPG з 100 ppr і хоче уповільнити максимальну швидкість з 14000 до 2000 мм/хв, для чого потрібно 12000 імпульсів, що призведе до 120 обертів колеса! Або інший користувач, який має колесо MPG з 500 ipr і хоче встановити перевищення шпинделя, яке має обмеження від 50 до 120 %, тому він переходить від мінімального до максимального значення за 70 імпульсів, що означає навіть не 1/4 оберту.
За замовчуванням усі шкали встановлюються за допомогою розрахунку:
(MAX - MIN)/100-
Starting RPM - Встановлює кількість обертів за хвилину, яка використовуватиметься, якщо шпиндель запущено, але значення S не встановлено.
NoteЦе значення буде попередньо встановлено відповідно до ваших налаштувань у [DISPLAY] DEFAULT_SPINDLE_SPEEDвашого INI-файлу. Якщо ви зміните налаштування на сторінці налаштувань, це значення буде стандартним з цього моменту, ваш INI-файл не буде змінено. -
Spindle bar min і Spindle bar max - Встановлює межі смуги шпинделя, що відображається в рамці INFO на головному екрані.
Значення за замовчуванням:
MIN = 0
MAX = 6000NoteНе помилка вказати неправильні значення. Якщо ви вкажете максимум 2000 об/хв, а ваш шпиндель обертається 4000 об/хв, то на швидкостях, вищих за 2000 об/хв, неправильним буде лише рівень прутка.
Є три варіанти розблокування сторінки налаштувань:
-
Use unlock code - Користувач повинен ввести код, щоб увійти.
-
Do not use unlock code - Перевірки безпеки не буде.
-
Use HAL pin to unlock - Для розблокування налаштувань апаратний PIN-код має бути високим, див. hardware unlock pin.
За замовчуванням використовувати код розблокування (код за замовчуванням 123).
Ці налаштування впливатимуть на швидкість штовхання.
-
Приховати кнопку черепашачого ходу - Приховає кнопку праворуч від повзунка швидкості ходу. Якщо ви приховаєте цю кнопку, переконайтеся, що активовано «режим кролика», інакше ви не зможете рухатися швидше, ніж черепашачий хід, який розраховується за допомогою коефіцієнта черепашачого ходу.
-
Turtle jog factor - Встановлює масштаб для режиму поштовхового переміщення черепахи (кнопка натиснута, відображається черепаха). Якщо встановити коефіцієнт 20, максимальна швидкість поштовхового переміщення черепахи становитиме 1/20 від максимальної швидкості машини.
|
Note
|
Цією кнопкою можна керувати за допомогою Turtle-Jog HAL Pin. |
7.3. Розширені налаштування
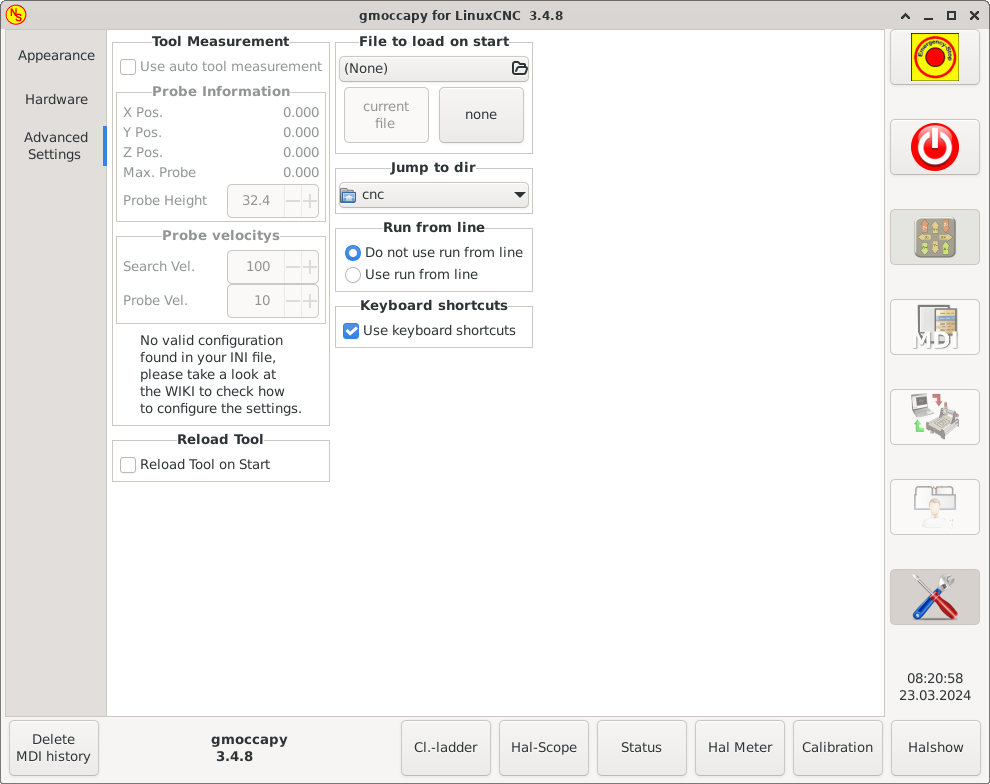
Будь ласка, перевірте Автоматичне вимірювання інструменту
|
Note
|
Якщо ця частина не є чутливою, у вас немає дійсної конфігурації INI-файлу для використання вимірювання інструменту. |
-
Use auto tool measurement - Якщо позначено, після кожної зміни інструменту буде виконуватися вимірювання інструменту, результат буде збережено в таблиці інструментів, а після зміни буде виконано команду G43.
- Інформація про зонд
-
Наступна інформація береться з вашого INI-файлу та має бути надана в абсолютних координатах:
-
X Pos. - Положення X перемикача інструменту.
-
Y Pos. - Положення перемикача інструменту по осі Y.
-
Z Pos. - Положення перемикача інструменту по осі Z, ми будемо швидко рухатися до цієї координати.
-
Max. Probe - Відстань для пошуку контакту, буде запущена помилка, якщо в цьому діапазоні немає контакту. Відстань повинна бути вказана у відносних координатах, починаючи рух від Z Pos., тому для руху вниз потрібно вказати від’ємне значення!
-
Probe Height - Висоту перемикача зонда можна виміряти. Просто торкніться основи, на якій розташований перемикач зонда, і встановіть значення нуль. Потім змініть інструмент і подивіться значення tool_offset_z, яке і потрібно ввести в цьому полі.
-
- Швидкості зонда
-
-
Search Vel. - Швидкість пошуку перемикача інструменту. Після контакту інструмент знову підніметься, а потім знову рухатиметься до зонда зі швидкістю зонда, що дозволить отримати кращі результати.
-
Probe Vel. - Швидкість другого руху до перемикача. Вона повинна бути повільнішою, щоб отримати кращі результати дотику. У режимі симуляції це закомментовано в macros/change.ngc, інакше користувач повинен був би двічі натиснути на кнопку зонда.
-
-
Reload Tool on Start - Завантажує останній інструмент на початку після повернення до початкового положення.
Якщо встановлено прапорець, інструмент у шпинделі буде зберігатися при кожній зміні у файлі налаштувань, що дозволить завантажити останній встановлений інструмент при запуску. Інструмент буде завантажено після повернення всіх осей у вихідне положення, оскільки до цього не дозволяється виконувати команди MDI. Якщо ви використовуєте NO_FORCE_HOMING, ви не можете використовувати цю функцію, оскільки необхідний сигнал all_homed_signal ніколи не буде подано.
Виберіть файл, який потрібно завантажити під час запуску. Якщо файл завантажено, його можна встановити, натиснувши кнопку «Поточний». Щоб уникнути завантаження будь-якої програми під час запуску, просто натисніть кнопку «Немає».
Екран вибору файлів буде використовувати фільтри, які ви встановили в файлі INI. Якщо фільтри не вказані, ви побачите тільки файли NGC. Шлях буде встановлено відповідно до налаштувань INI в [DISPLAY] PROGRAM_PREFIX.
Тут ви можете встановити каталог, до якого потрібно перейти, якщо натиснути відповідну кнопку у діалоговому вікні вибору файлу.
Ви можете дозволити або заборонити запуск з рядка. Це зробить відповідну кнопку нечутливою (сірою), тому користувач не зможе використовувати цю опцію. За замовчуванням запуск з рядка вимкнено.
|
Warning
|
Не рекомендується використовувати запуск з рядка, оскільки LinuxCNC не враховуватиме попередні рядки коду перед початковим рядком. Тому помилки або збої досить ймовірні. |
Деякі користувачі хочуть керувати своїм пристроєм за допомогою клавіш клавіатури, а інші ніколи цього не дозволять. Тому кожен може вибрати, чи використовувати їх, чи ні.
Клавіатурні скорочення за замовчуванням вимкнені. Їх можна активувати за допомогою прапорця
-
Використання комбінацій клавіш
|
Warning
|
Не рекомендується використовувати джоггинг за допомогою клавіатури, оскільки це становить серйозну небезпеку для оператора та машини. |
Будь ласка, будьте обережні, якщо ви використовуєте токарний верстат, тоді скорочення будуть іншими, див. Розділ.
8. Тема значків
Теми значків використовуються для налаштування зовнішнього вигляду та функціональності значків GMOCCAPY.
GMOCCAPY постачається з трьома різними темами іконок:
-
classic - Класичні іконки GMOCCAPY.
-
material – сучасна тема значків, натхненна іконками Material Icons від Google, яка автоматично приймає колір з вибраної теми робочого столу.
-
material-light – Похідний від material, але оптимізований для світлих тем робочого столу.
Тема іконок, яка використовується в GMOCCAPY, є звичайною темою іконок GTK, що відповідає специфікації теми іконок freedestktop. Таким чином, будь-яка дійсна тема іконок GTK може бути використана як тема іконок GMOCCAPY, якщо вона містить необхідні іконки.
GMOCCAPY сканує такі каталоги на наявність тем значків:
-
linuxcnc/share/gmoccapy/icons
-
~/.icons
8.1. Тема власних значків
Створити власну тему іконок досить просто. Все, що вам потрібно, це текстовий редактор і, звичайно, бажані іконки у вигляді піксельної або векторної графіки. Детальну інформацію про те, як саме створюється тема іконок, можна знайти на сайті Freedesktop Icon Theme Specification.
Почніть із створення порожнього каталогу з назвою теми іконок. Помістіть каталог в один із каталогів тем іконок GMOCCAPY. Потім нам знадобиться файл index.theme у кореневій папці нашої теми іконок, який містить необхідні метадані для теми. Це простий текстовий файл, що містить принаймні такі розділи:
-
[Тема значків]
[Icon Theme] Name=YOUR_THEME_NAME Comment=A DESCRIPTION OF YOUR THEME Inherits=hicolor Directories=16x16/actions,24x24/actions,32x32/actions,48x48/actions,scalable/actions-
Назва: Назва вашої теми значків.
-
Коментар: Опис вашої теми значків.
-
Успадковується: Тема значків може походити від іншої теми значків, за замовчуванням використовується hicolor.
-
Каталоги: список усіх каталогів вашої теми іконок, розділених комами.
Кожен каталог зазвичай містить усі іконки теми певного розміру, наприклад 16x16/actions повинен містити всі іконки категорії «actions» розміром 16x16 пікселів у вигляді піксельної графіки (наприклад, файли png). Окремим випадком є каталог «scalable/actions», який містить масштабовані іконки, не прив’язані до певного розміру (наприклад, файли svg).
Надаючи версії іконок різних розмірів, ми можемо гарантувати гарний вигляд іконок різних розмірів, а також маємо можливість змінювати іконку відповідно до її розміру, наприклад, іконка розміром 64x64 пікселів може містити більше деталей, ніж її версія розміром 16x16 пікселів.
-
-
Для кожного каталогу нам також потрібно написати розділ у файлі index.theme:
[16x16/actions] Size=16 Type=Fixed Context=Actions [scalable/actions] Size=48 Type=Scalable Context=Actions-
Розмір: Номінальний розмір значка в цьому каталозі
-
Тип: Фіксований, Пороговий або Масштабований
-
Контекст: Передбачувана «категорія» іконок
-
В основному це все, що потрібно для створення власної теми значків.
8.2. Символічні ікони
Символічні іконки — це особливий тип іконок, зазвичай монохромні зображення. Особливість символічних іконок полягає в тому, що вони автоматично забарвлюються під час виконання відповідно до теми робочого столу. Таким чином можна створювати теми іконок, які добре поєднуються як з темними, так і зі світлими темами робочого столу (насправді це не завжди найкращий варіант, тому існує спеціальна тема «material-light»).
Щоб скористатися функцією символіки, файл значка повинен мати суфікс .symbolic.$ext (де $ext — це звичайне розширення файлу, таке як png), наприклад, "power_on.symbolic.png".
З такою назвою GTK розглядає це зображення як символічний значок і застосовує деякі зміни кольорів під час завантаження значка. Дозволено використовувати лише чотири кольори:
| Колір | Шістнадцятковий код | Опис |
|---|---|---|
чорний |
|
Основний колір змінюється відповідно до основного кольору теми робочого столу. |
red |
|
Успіх: цей колір вказує на «успіх» (зазвичай щось зелене). |
green |
|
Попередження: цей колір означає «попередження» (зазвичай щось жовте/помаранчеве). |
blue |
|
Помилка: цей колір вказує на «помилку» (зазвичай щось червонувате). |
|
Tip
|
Приклади символічних значків можна знайти за адресою linuxcnc/share/gmoccapy/icons/material. |
9. Розділ, специфічний для токарного верстата
Якщо в файлі INI вказано LATHE = 1, графічний інтерфейс зміниться відповідно до особливих потреб токарного верстата. В основному, вісь Y буде прихована, а кнопки ручного переміщення будуть розташовані в іншому порядку.
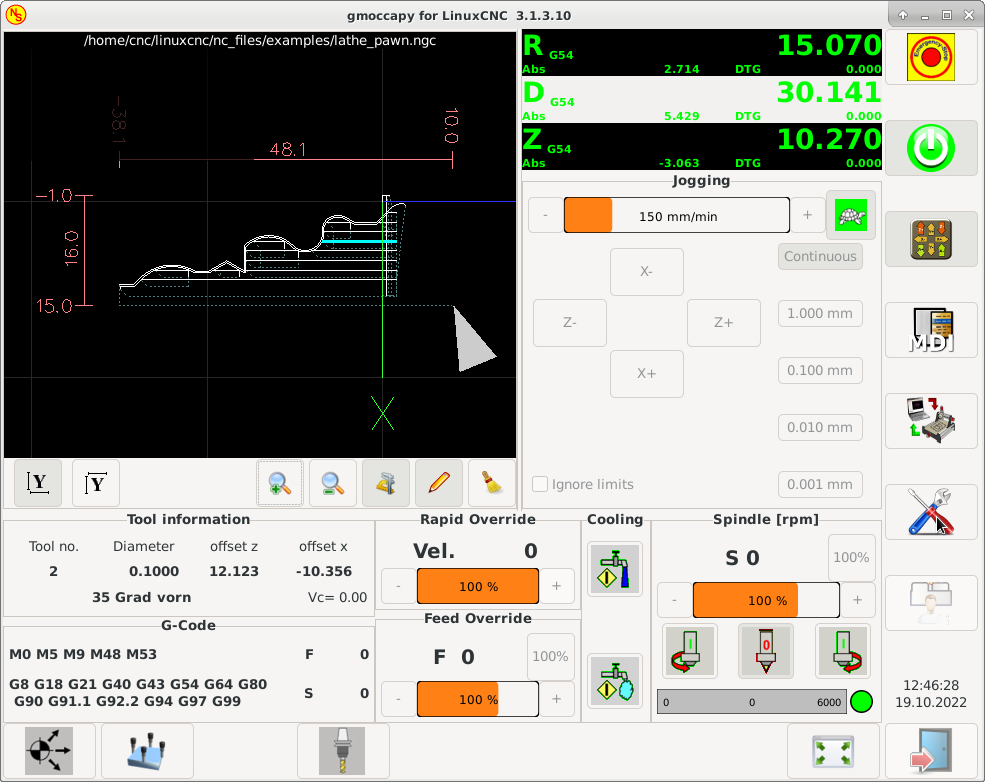
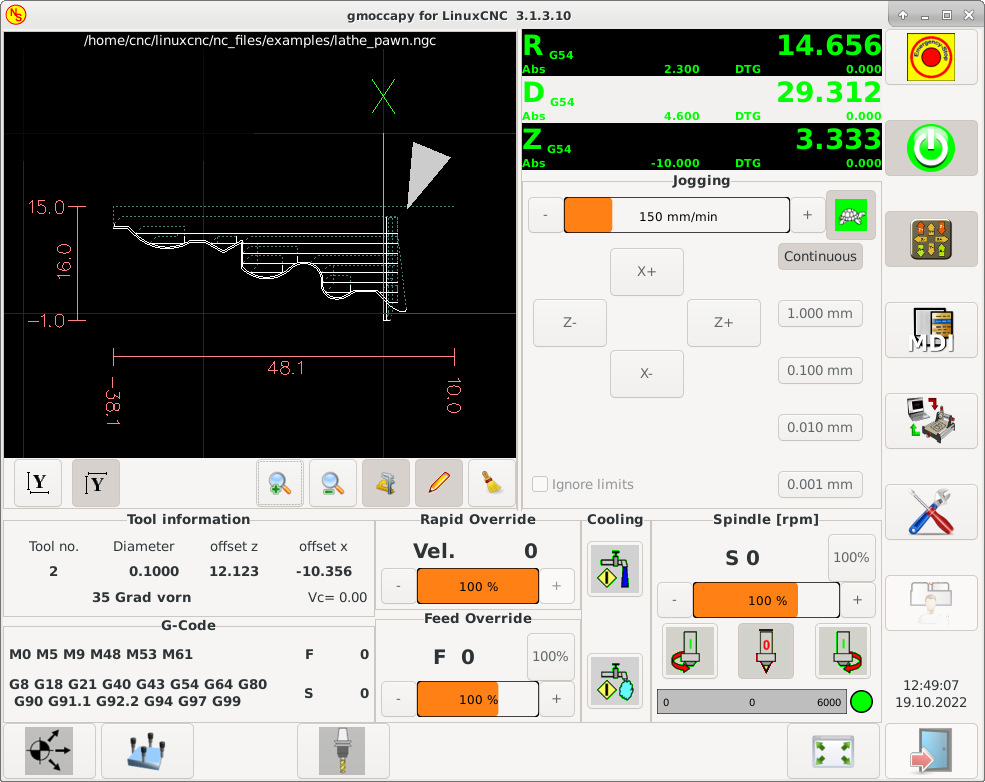
Як бачите, R DRO має чорний фон, а D DRO — сірий. Це змінюється відповідно до активного G-коду G7 або G8. Активний режим видно за чорним фоном, тобто на показаних зображеннях активний G8.
Наступною відмінністю від стандартного екрану є розташування кнопок перемикання. X і Z помінялися місцями, а Y зникла. Ви помітите, що кнопки X+ і X- змінюють своє розташування відповідно до нормального або зворотного інструменту токарного верстата.
Також зміниться поведінка клавіатури:
Звичайний токарний верстат:
-
Arrow_Left або NumPad_Left - Jog Z мінус
-
Arrow_Right або NumPad_Right - Jog Z плюс
-
Arrow_up або NumPad_Up - Jog X мінус
-
Arrow_Down або NumPad_Down - Jog X плюс
Токарний верстат із заднім інструментом:
-
Arrow_Left або NumPad_Left - Jog Z мінус
-
Arrow_Right або NumPad_Right - Jog Z плюс
-
Arrow_up або NumPad_Up - Jog X плюс
-
Arrow_Down або NumPad_Down - Jog X мінус
У інформаційному полі інструменту відображатиметься не лише зміщення Z, але й зміщення X, а таблиця інструментів відображатиме всю інформацію, що стосується токарного верстата.
10. Розділ, специфічний для плазми
Існує дуже гарна ВІКІ, яка насправді розвивається, підтримується Маріусом, див. сторінка вікі про Плазму.
11. Відео на YouTube
Нижче наведено серію відеороликів, які демонструють роботу GMOCCAPY. На жаль, ці відеоролики не показують останню версію GMOCCAPY, але спосіб її використання залишиться таким самим, як і в поточній версії. Я оновлю відеоролики якомога швидше.
11.1. Базове використання
11.2. Імітація джог-колес
11.3. Сторінка налаштувань
11.4. Імітація апаратної кнопки
Німецька: https://youtu.be/DTqhY-MfzDE
Англійська: https://youtu.be/ItVWJBK9WFA
11.5. Вкладки користувача
11.6. Відео про вимірювання інструментів
Моделювання вимірювання автоматичного інструменту: https://youtu.be/rrkMw6rUFdk
Екран автоматичного вимірювання інструменту: https://youtu.be/Z2ULDj9dzvk
Автоматична машина для вимірювання інструментів: https://youtu.be/1arucCaDdX4
12. Відомі проблеми
12.1. Дивні цифри в інформаційній області
Якщо ви отримуєте дивні числа в інформаційній області GMOCCAPY, наприклад:

Ви створили файл конфігурації за допомогою старішої версії StepConfWizard. Він створив неправильний запис у файлі INI під назвою [TRAJ] з назвою MAX_LINEAR_VELOCITY = xxx. Змініть цей запис на MAX_VELOCITY = xxx.
12.2. Не завершується макрос
Якщо ви використовуєте макрос без руху, як-от цей:
o<zeroxy> sub G92.1 G92.2 G40 G10 L20 P0 X0 Y0 o<zeroxy> endsub m2
GMOCCAPY не побачить кінець макросу, оскільки інтерпретатор повинен змінити свій стан на IDLE, але макрос навіть не встановлює інтерпретатор у новий стан. Щоб уникнути цього, просто додайте рядок G4 P0.1, щоб отримати необхідний сигнал. Правильний макрос буде таким:
o<zeroxy> sub G92.1 G92.2 G40 G10 L20 P0 X0 Y0 G4 P0.1 o<zeroxy> endsub m2