1. Вступ
MDRO — це простий графічний інтерфейс для LinuxCNC, що забезпечує відображення даних з цифрових шкал (DRO). Він надає функціональність, схожу на звичайний дисплей DRO для верстатів, дозволяючи користувачеві використовувати шкали DRO на верстаті під час роботи в ручному режимі (з ручним приводом). Він найбільш корисний для ручних верстатів, таких як фрезерні верстати типу Bridgeport, оснащені DRO, які були переобладнані на CNC, але все ще мають ручне управління.
MDRO зручний для роботи з мишею та сенсорним екраном.
2. Початок роботи
Якщо ваша конфігурація наразі не налаштована на використання MDRO, ви можете змінити її, відредагувавши файл INI. У розділі [DISPLAY] змініть рядок DISPLAY = на DISPLAY = mdro. За замовчуванням MDRO використовує осі XYZ, але це можна змінити. Встановіть розділ [DISPLAY] GEOMETRY = XYZ для 3-осьового фрезерного верстата. Токарний верстат з шкалами DRO на осях X і Z може використовувати GEOMETRY = XZ.
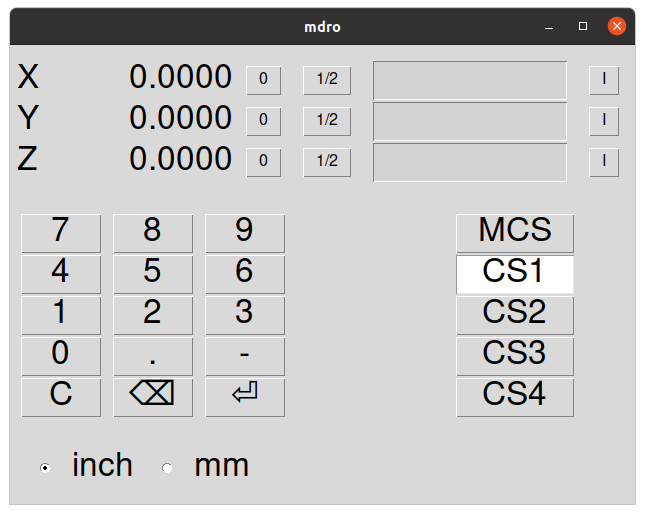
When MDRO starts, a window like the one in the figure [fig:mdro-window] above opens.
2.1. Параметри INI-файлу
Інші опції, які можна включити до розділу [DISPLAY], включають:
-
MDRO_VAR_FILE = <file.var>- попереднє завантаження даних системи координат G54 - G57.-
Попередньо завантажте файл .var. Зазвичай це файл .var, який використовується операційним кодом.
-
-
POINT_SIZE = <n>- Встановити розмір тексту в пунктах.-
Цей параметр встановлює розмір шрифту, який визначає загальний розмір вікна. Розмір за замовчуванням становить 20 пунктів, типові розміри — від 20 до 30.
-
-
MM = 1Встановіть це значення, якщо шкали DRO надають дані, масштабовані в міліметрах.
2.2. Параметри командного рядка
MDRO можна запустити командою loadusr у HAL-файлі. Параметри, еквівалентні тим, що є у INI-файлі, можна встановити в командному рядку:
-
-l <file.var>- попереднє завантаження даних системи координат G54 - G57. -
-p <n>- Встановити розмір тексту в пунктах. -
-m- Встановіть це значення, якщо шкали DRO надають дані, масштабовані в міліметрах. -
<axes>- осі для відображення. Див.ГЕОМЕТРІЯвище.
2.3. Піни
Використовуючи приклад "XYZA" для аргументу AXES, ці контакти будуть створені під час запуску MDRO:
mdro.axis.0 mdro.axis.1 mdro.axis.2 mdro.axis.3 mdro.index-enable.0 mdro.index-enable.1 mdro.index-enable.2 mdro.index-enable.3
У цьому прикладі перший рядок дисплея буде позначений як «X» і відображатиме дані зі шкали DRO, підключеної до виводу «mdro.axis.0». Виводи «mdro.index-enable.n» слід підключити до індексних виводів DRO, якщо DRO їх підтримує.
Контакти повинні бути підключені у файлі, вказаному в записі POSTGUI_HALFILE файлу INI, коли програма запускається з файлу INI. Вони можуть бути встановлені безпосередньо після команди loadusr, якщо програма запускається з файлу HAL.
3. Вікно MDRO
Вікно MDRO містить такі елементи:
-
Рядок для кожної осі. Кожен рядок містить:
-
назва осі,
-
поточне значення,
-
кнопка "z", яка обнуляє значення,
-
кнопка "1/2", яка зменшує значення вдвічі,
-
поле введення, яке можна використовувати для встановлення значення, визначеного користувачем. Це поле можна встановити з клавіатури або за допомогою екранної клавіатури.
-
Кнопка «I», яка запускає операцію з індексом (див. нижче),
-
-
клавіатура, що використовується для встановлення значень у полі введення за допомогою миші або сенсорного екрана,
-
кнопки вибору системи координат:
-
Кнопка "mcs" вибирає систему координат машини. Це необроблені значення з енкодерів, підключених до контактів
mdro.axis.n. -
Кнопки «cs1» - «cs4» дозволяють користувачеві вибрати одну з чотирьох визначених користувачем систем координат. Якщо програма запущена з опцією
MDRO_VAR_FILE =, мітки будуть змінені на «g54» - «g57», а значення з вказаного файлу .var будуть завантажені заздалегідь. Зверніть увагу, що будь-які зміни значень не є постійними: файл .var ніколи не змінюється.
-
-
Кнопки вибору дюймів/міліметрів.
4. Операції з індексами
MDRO підтримує шкали DRO з індексними позначками. Натисніть кнопку «I» на рядку осі, а потім поверніть вісь до індексного положення. Координати верстата будуть обнулені. Це найлегше побачити під час запуску або коли вибрано систему координат «mcs».
5. Симулятор
Найпростіший спосіб побачити, як працює MDRO, – це спробувати його в середовищі симуляції. Додайте цей розділ у кінець вашого HAL-файлу симуляції, зазвичай це "hallib/core_sim.hal":
loadusr -W mdro -l sim.var XYZ net x-pos-fb => mdro.axis.0 net y-pos-fb => mdro.axis.1 net z-pos-fb => mdro.axis.2